版本 1c234b13a60f5517ab73b326d30650638b055c77
Changes from 1c234b13a60f5517ab73b326d30650638b055c77 to current
---
title: Xenomai
categories: embedded, arm, raspberrypi
categories: embedded, arm, raspberrypi, rpi, realtime, linux, rtos, xenomai, preempt_rt
...
協作者
=====================================================================
建立環境
==============================
* Install Cross complier
.. code-block:: c
* 2016 年春季
- [黃鏡清](http://wiki.csie.ncku.edu.tw/User/Workfunction), [王紹華](http://wiki.csie.ncku.edu.tw/User/Hua), [陳博聖](http://wiki.csie.ncku.edu.tw/User/ponsheng)
cd <working dir>
wget https://github.com/raspberrypi/tools/archive/master.tar.gz
tar xzf master.tar.gz
* 2015 年春季
- 吳哲綱, 曾柏翔, 林展翔, 詹志鴻, 林建慶, 呂鴻, 楊于進
* Download source files and patches
- Download kernel
* 2014 年春季
- 向澐, 林家宏, 呂科進, 趙愷文, 阮志偉, 陳建霖
.. code-block:: c
git clone -b rpi-3.8.y --depth 1 git://github.com/raspberrypi/linux.git linux-rpi-3.8.y
- Download Xenomai
Real Time 的定義
=====================================================================
.. code-block:: c
git clone git://git.xenomai.org/xenomai-head.git xenomai-head
- Download minimal config
一個real time的系統需要保證其工作在給定的時間限制內完成(稱為deadline)。
系統不需要以最快的速度(real fast)完成任務,但需要時常或每次皆在deadline之內完成。
.. code-block:: c
在這個前提下,real time系統的任務完成時間是可確定的(deterministic)。
而根據系統的限制不同,real time可分為:
wget https://www.dropbox.com/s/dcju74md5sz45at/rpi_xenomai_config
* Soft Real Time
系統不一定每次皆需要遵守deadline,但較多的deadline miss會導致服務品質降低。
* Apply patches
* Hard Real Time
系統能每次皆能在deadline內完成任務。
- Apply ipipe core pre-patch
Real time on Linux
=====================================================================
.. code-block:: c
cd linux-rpi-3.8.y
patch -Np1 < ../xenomai-head/ksrc/arch/arm/patches/raspberry/ipipe-core-3.8.13-raspberry-pre-2.patch
* PREEMPT_RT (in-kernel; single kernel)
- Apply Xenomai ipipe core patch
修改原本的 GNU/Linux 核心 (vanilla kernel),以減少non-preemptible section的方式,使其逐步改善 real-time 能力。
.. code-block:: c
* dual kernel (如 RTLinux, RTAI, Xenomai)
xenomai-head/scripts/prepare-kernel.sh --arch=arm --linux=linux-rpi-3.8.y --adeos=xenomai-head/ksrc/arch/arm/patches/ipipe-core-3.8.13-arm-3.patch
運作一個 real-time 核心,然後將修改過的 GNU/Linux 核心程式碼視為該 real-time 核心的 idle task。
- Apply ipipe core post-patch
在xenomai中,dual kernel 就是 Xenomai 的 Nucleus / Cobalt Core 和 Linux kernel。Xenomai 改變整個系統架構,讓 ipipe -> xenomai scheduler 來預先處理 real-time task,而 Linux 則拉到上層成為一個task。這樣可以避免 Linux 因為龐大的架構而影響處理 real-time 的時間。
.. code-block:: c
Xenomai系統架構
=====================================================================
cd linux-rpi-3.8.y
patch -Np1 < ../xenomai-head/ksrc/arch/arm/patches/raspberry/ipipe-core-3.8.13-raspberry-post-2.patch
* Compile kernel
- Create build directory
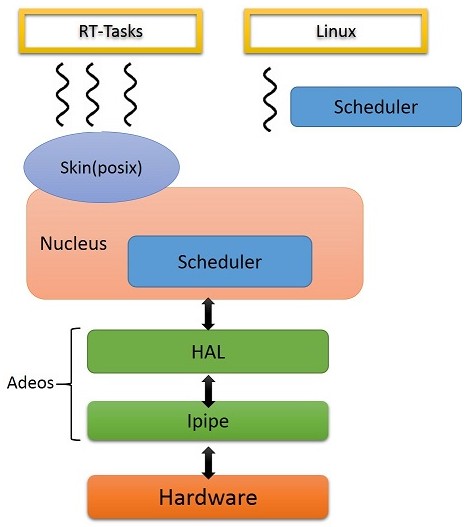
Xenomai是一個linux kernel的patch
藉由在底層增加一個架構
負責硬體與接收interrupt 並將interrupt 傳給上層的OS(這邊稱為domain)
這個底層的架構是Adeos 是另一個open source的project
.. code-block:: c
mkdir linux-rpi-3.8.y/build
在api呼叫上可以看到不同層級的抽象化
- Configure kernel
ipipe_XXX -> rthal_XXX -> xnXXX
.. code-block:: c
負責傳送interrupt的程式稱為ipipe
示意圖 :
cp rpi_xenomai_config linux-rpi-3.8.y/build/.config
cd linux-rpi-3.8.y
make mrproper
make ARCH=arm O=build oldconfig
- Compile
可以找到ipipe_raise_irq()將interrupt推到pipeline
.. code-block:: c
在ipipe上每個domain都有自己的優先度
高優先度的domain會先接收到interrupt
高優先度的domain的thread 可以preempt低優先度domain的thread
make ARCH=arm O=build CROSS_COMPILE=../../tools-master/arm-bcm2708/arm-bcm2708hardfp-linux-gnueabi/bin/arm-bcm2708hardfp-linux-gnueabi-
- Install modules
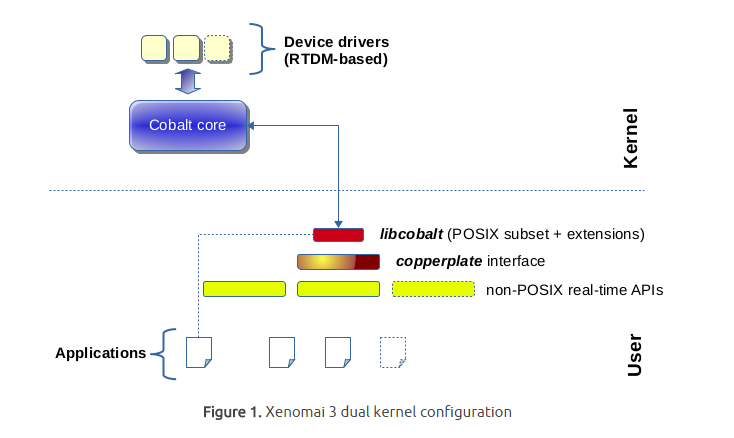
## Xenomai 3
.. code-block:: c
xenomai3有兩種configuration:
make ARCH=arm O=build INSTALL_MOD_PATH=dist modules_install
* Cobalt: 採用dual kernel架構,是xenomai 2的延伸
- Install headers
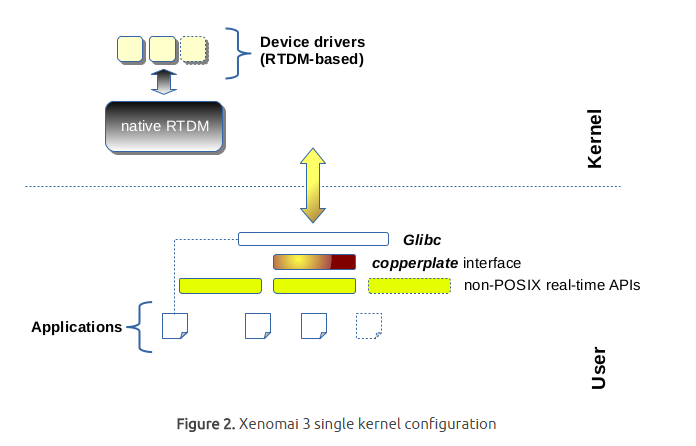
* Mercury: 使用單kernel形式,在linux kernel上提供xenomai api,由於本身依賴linux,一般來說會以PREEMPT_RT提供real-time services
.. code-block:: c
**Xenomai 3 dual kernal configuration : Cobalt**
make ARCH=arm O=build INSTALL_HDR_PATH=dist headers_install
find build/dist/include \( -name .install -o -name ..install.cmd \) -delete
* 編譯好的kernelImage,移到SD卡的 ``/boot/`` 路徑下並更改名稱為kernel.img
* 將``linux-rpi-3.8.y/build/dist``中的Module,移到SD卡中的``/lib/modules``
* Cyclictest
- Linux
多一個 priority 比 linux 還高叫 cobalt 的 core 去處理 real-time 的事情,提供不同的 real-time API 給不同的 applications 使用。並且利用Optimistic interrupt protection 機制減少 changing the interrupt mask,一般的機制在每次進入critical section時都要interrupt mask,而Optimistic interrupt protection可以不用。而real-time 在意的 "deadline",實際上就是探討 latency (latency 越大,系統越難在時限內完成完成高優先權任務,自然即時能力就越差),而 latency 很大的來源則是 interrupt handling。
.. code-block:: c
**Xenomai 3 single kernel configuration :Mercury**
- Xenomai
.. code-block:: c
cd xenomai-head
export PATH=../tools-master/arm-bcm2708/arm-bcm2708hardfp-linux-gnueabi/bin/:$PATH
./configure --host=arm-bcm2708hardfp-linux-gnueabi
cd src
mkdir dist
make install DIST_DIR=dist
運用本機的 linux core 在 PREEMPT_RT之上達到 real-time 的事情,這裡不是強制的,看 applications 對反應時間和 maximum jitter 的要求,有些甚至會作到某種程度 deadline 的忽略。
dist中會出現``usr/xenomai``
將這個資料夾移到sd卡中 ``/usr/``
## Adeos / iPipe
在raspberry pi中
.. code-block:: c
主要負責處理irq 與 high resolution timer, ipipe的工作很簡單 就是設定timer並將interrupt往上丟
export PATH=/usr/xenomai/bin:$PATH
export LD_LIBRARY_PATH=/usr/xenomai/lib
sudo modprobe xeno_posix
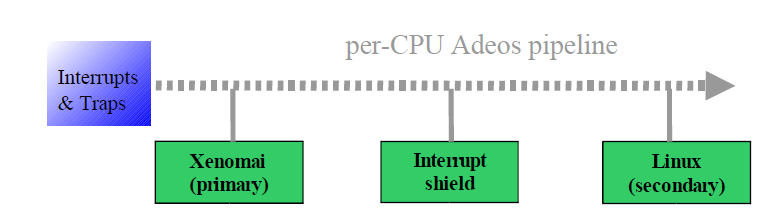
* Adeos feature
接著就能跑使用xenomai機制的cyclictest
- event pipeline :
- RT_preempt
利用pipeline的方式將不同domain的interrupt或system call往上丟
- Optimistic interrupt protection :
Real Time 的定義
==============================
當同一個domain在處理interrupt時,有跟她相同domain的interrupt要進來時,會將它進pending狀態,等到所有pending interrupt完成時,才會處理下個domain的interrupt。但更高優先權domain的interrupt會preempt較低優先權domain的interrupt。
* Hard Real Time
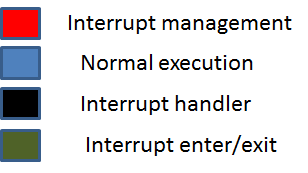
- Optimistic v.s Original :
系統一定可以在 Response Time 內完成指定的task
Original case:
* Soft Real Time
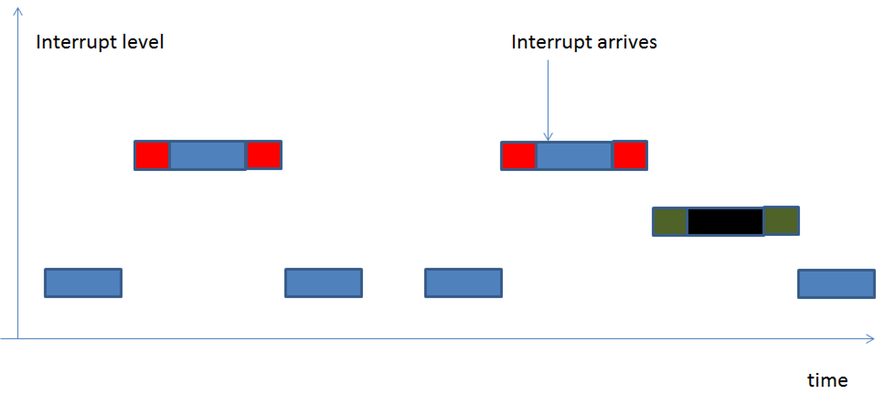
在特定的機率下,系統可以在 Response Time 內完成指定的task
作業系統架構
===========
Optimistic case:
.. image:: /xenoarch2.jpg
Xenomai是一個linux kernel的patch
藉由在底層增加一個架構
負責硬體與接收interrupt 並將interrupt 傳給上層的OS(這邊稱為domain)
這個底層的架構是Adeos 是另一個open source的project
基本架構示意圖
http://dchabal.developpez.com/tutoriels/linux/xenomai/images/image04.png
從前兩張圖可看出一般的機制在每次進入critical section時都要interrupt mask,而Optimistic interrupt protection可以不用,所以在interrupt management的時間差很多。而real-time 在意的 “deadline”,實際上就是探討 latency (latency 越大,系統越難在時限內完成完成高優先權任務,自然即時能力就越差),而 latency 很大的來源則是 interrupt handling。
在api呼叫上可以看到不同層級的抽象化
ipipe_XXX -> rthal_XXX -> xnXXX
上一層對下一層的操作方式基本上會固定 但下一層的實作一硬體或config有所差異
- System event propagation :
負責傳送interrupt的程式稱為ipipe
示意圖
http://www.xenomai.org/documentation/xenomai-2.6/html/pictures/life-with-adeos-img4.jpg
system event(ex : page fault handle) 傳遞方式不同於interrupt,基本上是不可被stall的。
可以找到ipipe_raise_irq()將interrupt推到pipeline
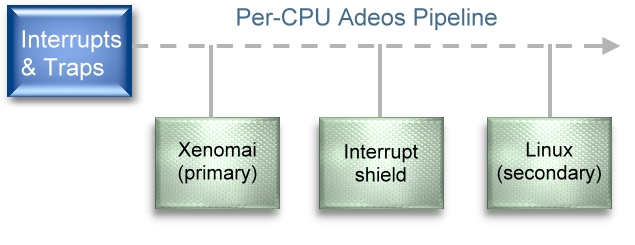
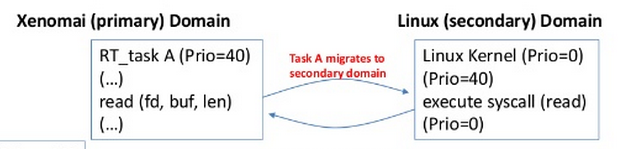
* realtime support to threads running in the secondary domain
在ipipe上每個domain都有自己的優先度
高優先度的domain會先接收到interrupt
高優先度的domain的thread 可以preempt 低優先度domain的thread
- Common priority scheme :
當xenomai task migrates to linux domain時,linux domain會繼承xenomai task的priority。
iPipe
++++++++++++++
主要負責處理irq 與 timer(HRT), ipipe的工作很簡單 就是設定timer並將interrupt往上丟
- Predictability of program execution times :
當xenomai threads 進入linux(secondary) domain時,不可被linux domain interrupt preempt掉,也不能被其他low priority activity at linux kernel preempt掉。通常最簡單實作方式就是加一個interrupt shield domain。
- Fine-grained Linux kernel :
In order to get the best from secondary domain,we need the Linux kernel to exhibit the shortest possible nonpreemptible section, so that rescheduling opportunities are taken as soon as possible after a Xenomai thread running in the secondary domain becomes ready to run.
- Priority inversion management :
Both the real-time nucleus and the Linux kernel should handle the case where a high priority thread is kept from running because a low priority one holds a contented resourse for a possibly unbounded amount of time.
* 相關檔案︰
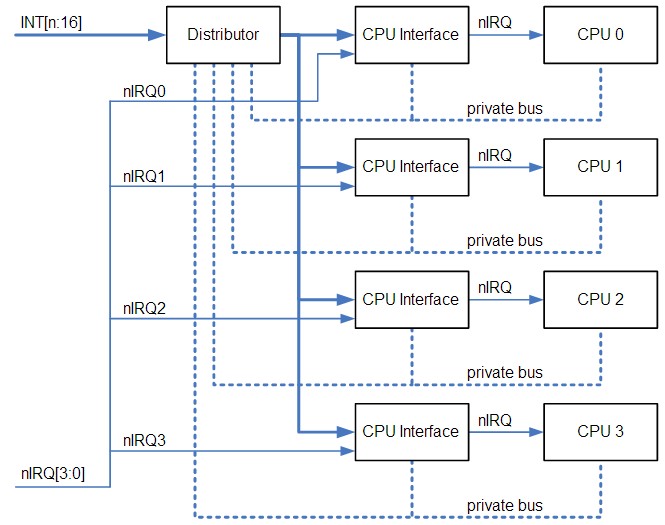
- gic.c :
- gic.c(舊版) -> irq-gic.c(新版) :
Generic Interrupt Controller, Interrupt prioritization and distribution to each CPU interface. This is known as the Distributor. Priority masking and preemption handling for each CPU. This is known as the CPU Interface.
Generic Interrupt Controller(GIC)為ARM架構中負責分配interrupt至cpu的裝置。此檔案實作gic功能的界面,包含init、mask、產生軟體interrupt、end of interrupt、取得資訊等。內容除了gic register操作外,也包含了spin locks。
- it8152.c:IRQ相關
- it8152.c:提供ITE8152 (PCI Bridge)的支援。目前該硬體已經停止生產 。
- timer-sp.c:dual timer module(sp804)
- timer-sp.c:ARM Dual-Timer Module (SP804)的界面。SP804提供兩個32/64bit count down counter,並提供timer interrupt。
- vic.c:
- vic.c -> irq-vic.c:
The VIC provides a software interface to the interrupt system. In a system with an interrupt controller, software must determine the source that is requesting service and where its service routine is loaded. A VIC does both of these in hardware.
提供Vectored Interrupt Controller(VIC)的界面。VIC主要存在於armv6或以前的架構中,提供priority、IRQ vector等功能,但並不支援SMP。在armv7之後的架構中,其漸漸被NVIC(Cortex-M)與GIC(Cortex-R/A)取代。
- ipipe-tsc.c:設定精準度(刻度)
- ipipe-tsc.c -> ipipe_tsc.c:Time Stamp Counter的界面,提供自reset起cycle數的計算。
- ipipe/compat.c:interrupt
- ipipe/compat.c:與I-pipe legacy interface相關。
- sched/clock.c:取得cpu_clock 解析度為nanasecond,開機後從0開始上數
- sched/clock.c:取得cpu_clock 解析度為nanosecond,開機後從0開始上數。在新版(3.18)ipipe中,此檔案並無修改。
HAL
++++++++++++
GIC大約是上圖的distributor的位置
Hardware Abstract Layer:prcess 透過HAL呼叫ipipe的服務。這一層主要是包裝ipipe 與底層資訊 讓nucleus可以不用看到硬體資訊。
但raspberry pi只有一顆CPU所以不會有SMP與 CPU affinity設定的問題
## HAL
Nucleus
++++++++++++
檔案位置在 : xenomai-head/ksrc/arch/arm/hal.c (xenomai 2.6)
Xenomai的kernel, 包含一個scheduler,優先執行real-time tasks.
Hardware Abstract Layer:process 透過HAL呼叫ipipe的服務。這一層主要是包裝ipipe 與底層資訊 讓nucleus可以不用看到硬體資訊。
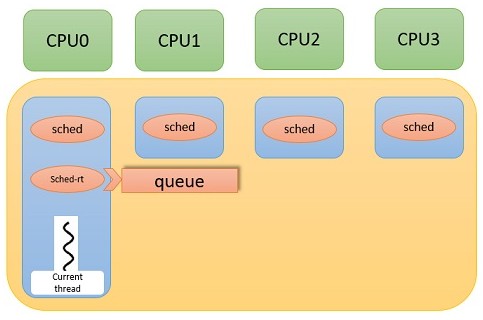
Scheduler
++++++++++++
## Nucleus / Cobalt
檔案位置在 : xenomai-head/ksrc/nucleus (xenomai 2.6) ; xenomai-head/kernel/cobalt (xenomai 3)
Xenomai的kernel, 包含schedule、timer、synch、thread、lock等等一般該有的RTOS功能,負責real-time tasks的執行。
## Scheduler
優先處理realtime task ,linux也被視為其中一個thread,本身也有scheduler,但須等到沒有real-time task時(idle state),才會執行linux thread
問題
++++++++++++
與 RT-PREEMPT 途徑的差異?
就檔案有五個關於sched.c應該有四種不同的schedule方式
sched-idle.c :是專門處理idle狀態給linux schedule使用
sched-rt.c : 給real-time scheduler使用(FIFO+RR)
實作
==================
sched-sporadic.c : POSIX SCHED_SPORADIC scheduling class.
sched-tp.c : Temporal partitioning (typical of IMA systems)
Context switch
sched.c : 應該是負責四個schedule方式的檔案
.. code-block:: prettyprint
ksrc/arch/arm/switch.S
/*
/*
* Switch context routine.
*
* Registers according to the ARM procedure call standard:
* Reg Description
* r0-r3 argument/scratch registers
* r4-r9 variable register
* r10=sl stack limit/variable register
* r11=fp frame pointer/variable register
* r12=ip intra-procedure-call scratch register
* r13=sp stack pointer (auto preserved)
* r14=lr link register
* r15=pc program counter (auto preserved)
*
* Copied from __switch_to, arch/arm/kernel/entry-armv.S.
* Right now it is identical, but who knows what the
* future reserves us...
*
* XXX: All the following config options are NOT tested:
* CONFIG_IWMMXT
*
* Calling args:
* r0 = previous task_struct, r1 = previous thread_info, r2 = next thread_info
*/
ENTRY(rthal_thread_switch)
add ip, r1, #TI_CPU_SAVE
ARM( stmia ip!, {r4 - sl, fp, sp, lr} ) @ Store most regs on stack
THUMB( stmia ip!, {r4 - sl, fp} ) @ Store most regs on stack
THUMB( str sp, [ip], #4 )
THUMB( str lr, [ip], #4 )
load_tls r2, r4, r5
#ifdef USE_DOMAINS
ldr r6, [r2, #TI_CPU_DOMAIN]
#endif
clear_exclusive_monitor
switch_tls r1, r4, r5, r3, r7
#ifdef USE_DOMAINS
mcr p15, 0, r6, c3, c0, 0 @ Set domain register
#endif
fpu_switch r4
ARM( add r4, r2, #TI_CPU_SAVE )
ARM( ldmia r4, {r4 - sl, fp, sp, pc} ) @ Load all regs saved previously
THUMB( add ip, r2, #TI_CPU_SAVE )
THUMB( ldmia ip!, {r4 - sl, fp} ) @ Load all regs saved previously
THUMB( ldr sp, [ip], #4 )
THUMB( ldr pc, [ip] )
ENDPROC(rthal_thread_switch)
## Skins
Timer
+++++++++++
檔案位置在xenomai-head/ksrc/skins (xenomai 2.6)
Scheduler
+++++++++++
依據預設 Xenomai 組態,nucleus 程式碼的兩個檔案未被編譯進去:
- sched-tp.c
- sched-sporadic.c
呼叫xenomai的界面, 有native rtdm posix psos+ uitron vrtx vxworks等。
xnpod
+++++++++++
.. code-block:: prettyprint
Xenomai與PREEMPT_RT的差異
=====================================================================
struct xnpod {
xnflags_t status; /*!< Status bitmask. */
* Linux kernel preemption model 組態 (realtime程度 ↑ => latency↓ but throughput↓)
- PREEMPT_NONE
xnsched_t sched[XNARCH_NR_CPUS]; /*!< Per-cpu scheduler slots. */
著重fairness和throughput,process在執行system call時無法被preempt。
xnqueue_t threadq; /*!< All existing threads. */
#ifdef CONFIG_XENO_OPT_VFILE
struct xnvfile_rev_tag threadlist_tag;
#endif
xnqueue_t tstartq, /*!< Thread start hook queue. */
tswitchq, /*!< Thread switch hook queue. */
tdeleteq; /*!< Thread delete hook queue. */
- PREEMPT_VOLUNTARY(DESKTOP)
atomic_counter_t timerlck; /*!< Timer lock depth. */
允許一個低優先權的 process把自己 preempt掉(即便該 process正在 kernel mode 執行著一個系統呼叫)
xntimer_t tslicer; /*!< Time-slicing timer for aperiodic mode */
int tsliced; /*!< Number of threads using the slicer */
- PREEMPT(Low-Latency Desktop)
- PREEMPT_RT
int refcnt; /*!< Reference count. */
著重determinism,對即時系統而言,作業系統的「可決定性」比 throughput 更為重要,使用固定優先權的 preemptive 排程策略 (POSIX SCHED_FIFO 與 SCHED_RR)。
#ifdef __XENO_SIM__
void (*schedhook) (xnthread_t *thread, xnflags_t mask); /*!< Internal scheduling hook. */
#endif /* __XENO_SIM__ */
};
* PREEMPT_RT 機制
- Preemptible critical sections
- Preemptible interrupt handlers
- Preemptible "interrupt disable" code sequences
- Priority inheritance for in-kernel spinlocks and semaphores
- Deferred operations
- Latency-reduction measures
- Execute all activities (including IRQ) in “schedulable/thread” context
效能表現
=======
* `Cyclictest<https://rt.wiki.kernel.org/index.php/Cyclictest>`_
* Test case: POSIX interval timer, Interval 500 micro seconds,. 100000 loops, 100% load.
- Commandline: cyclictest -t1 -p 80 -i 500 -l 100000
原本無法preempt的地方讓他可以preemt,讓spinlock 區塊在區分成可以preempt的地方跟不能preempt的地方,將IRQ handler移到thread中執行。
* 使用 PREEMPT LINUX
Priority inheritance 是讓握有spinlock 或 semaphore的process可以暫時的提高優先權 讓他可以盡快做完critical section釋放spinlock或semaphore
.. code-block:: prettyprint
高Priority的 process才有辦法繼續執行。
root@raspberrypi:/home/pi# sudo ./cyclictest -t1 -p 80 -i 500 -l 100000
# /dev/cpu_dma_latency set to 0us
policy: fifo: loadavg: 0.00 0.01 0.05 1/61 2064
T: 0 ( 2063) P:80 I:500 C: 100000 Min: 27 Act: 49 Avg: 42 Max: 1060
* PREEMPT_RT 與 xenomai的差異
* 使用 RT-PREEMPT
RT_PREEMPT是基於linux架構去改進 讓更多地方能preempt 達到real-time的能力
.. code-block:: prettyprint
Xenomai則是改變整個系統架構 新增一個scheduler與IRQ管理的機制
Linux raspberrypi 3.6.11+ #474 PREEMPT Thu Jun 13 17:14:42 BST 2013 armv6l GNU/Linux
Min: 22 Act: 31 Avg: 32 Max: 169
讓處理real-time task流程簡化到只剩ipipe->scheduler 就能執行
* 使用 Xenomai
不會因linux龐大的架構影響到real-time task的處理時間
.. code-block:: prettyprint
Linux raspberrypi 3.8.13-core+ #1 Thu Feb 27 03:02:16 CST 2014 armv6l GNU/Linux
Min: 1 Act: 5 Avg: 6 Max: 41
使用的硬體規格
=====================================================================
.. code-block:: prettyprint
root@raspberrypi:/home/pi# /usr/xenomai/bin/cyclictest -t1 -p 80 -i 500 -l 10000
0.08 0.06 0.05 1/61 2060
T: 0 ( 2060) P:80 I: 500 C: 100000 Min: -4 Act: -2 Avg: 0 Max: 30
* cyclictest 做法
## Raspberry pi
概念:
取得現在時間接著讓process睡一個間隔
等process醒來後再取一次時間
比對兩次取得的時間差與設定的間隔差距
pseudocode:
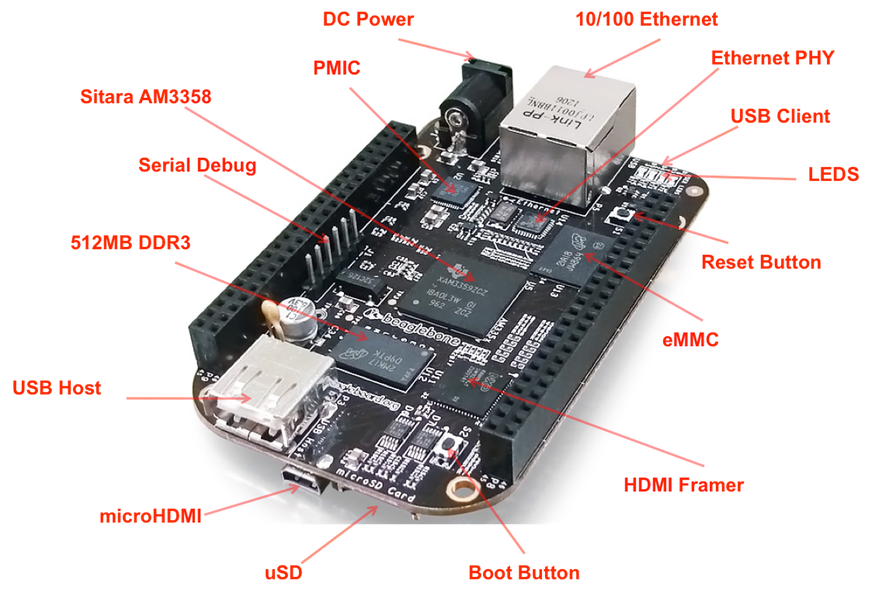
## Beaglebone
.. code-block:: prettyprint
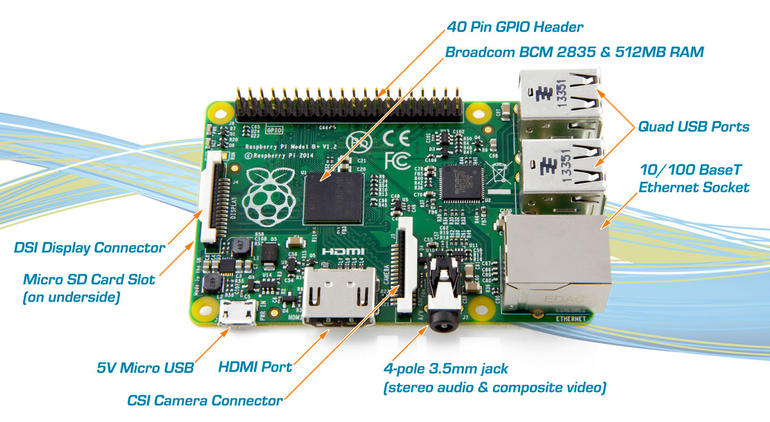
* 詳細規格,腳位圖,及GPIO
- https://hackpad.com/Raspberry-pi-beaglebone-xvENpXJvKIF#:h=GPIO
## Raspberry Pi 3
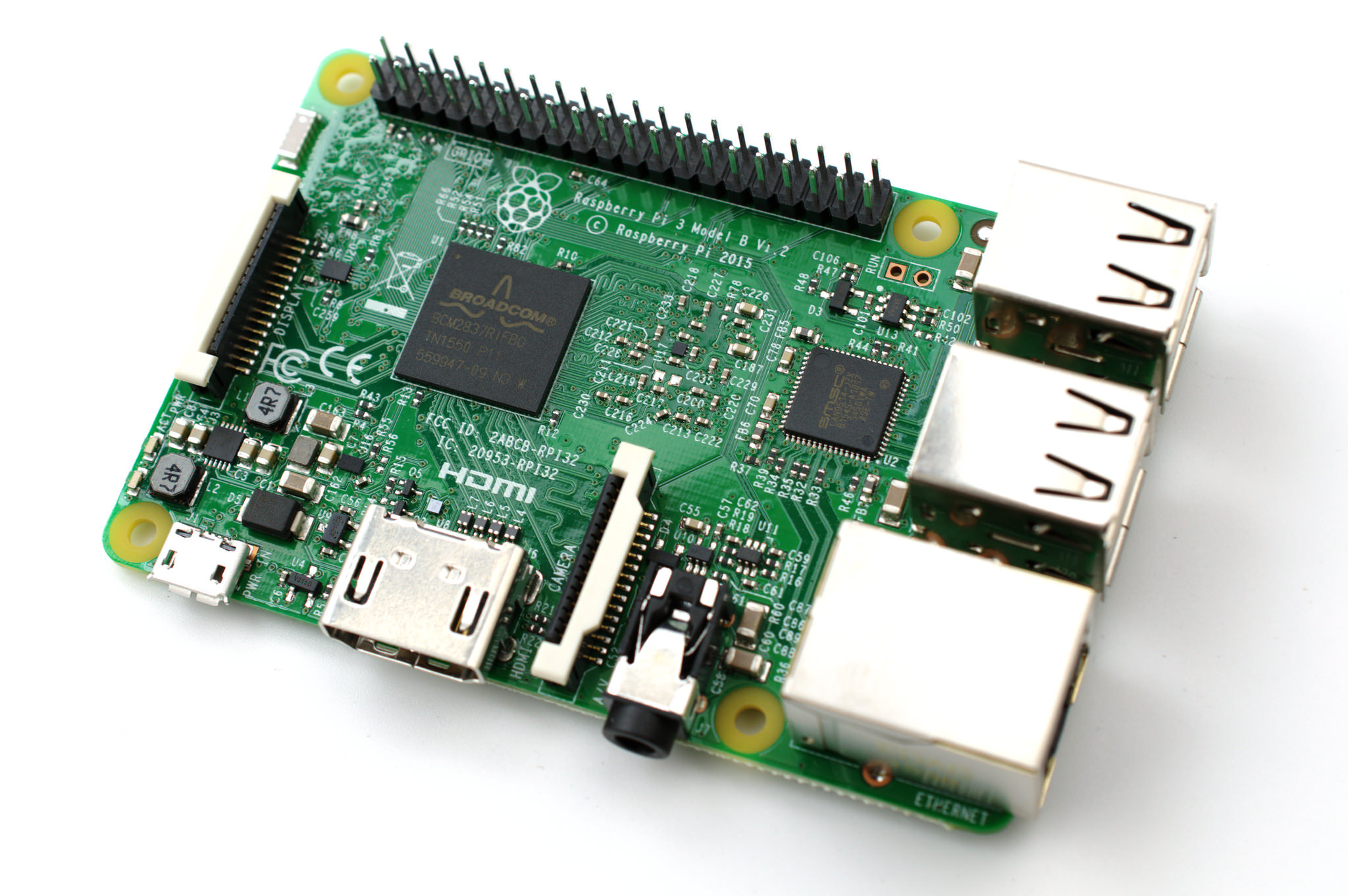
* A 1.2GHz 64-bit quad-core ARMv8 CPU
* With embedded bluetooth chip and wifi chip
* 802.11n Wireless LAN
* Bluetooth 4.1
* Bluetooth Low Energy (BLE)
建立 Xenomai 環境
========================================================================
## Xenomai 2.6 on raspberry pi
* 下載 Raspbian: http://www.raspberrypi.org/downloads/
- 將raspbian的img檔燒進sd card上
```
sudo dd if=<raspbian image file> of=/dev/mmcblk0 bs=4M
```
- ``if`` 為 input file, ``of`` 為 output file, ``bs``為 block size
- 燒錄詳細介紹: http://life-of-raspberrypi.blogspot.tw/
* Install Cross complier
```
cd <working dir>
wget https://github.com/raspberrypi/tools/archive/master.tar.gz
tar xzfv master.tar.gz
```
* Download kernel
```
git clone -b rpi-3.8.y --depth 1 git://github.com/raspberrypi/linux.git linux-rpi-3.8.y
```
* Download Xenomai
```
git clone git://git.xenomai.org/xenomai-head.git xenomai-head
```
* Download minimal config
```
wget https://www.dropbox.com/s/dcju74md5sz45at/rpi_xenomai_config
```
* Apply ipipe core pre-patch
```
cd linux-rpi-3.8.y
patch -Np1 < ../xenomai-head/ksrc/arch/arm/patches/raspberry/ipipe-core-3.8.13-raspberry-pre-2.patch
```
* Apply Xenomai ipipe core patch
```
cd <working dir>
./xenomai-head/scripts/prepare-kernel.sh --arch=arm --linux=linux-rpi-3.8.y --adeos=xenomai-head/ksrc/arch/arm/patches/ipipe-core-3.8.13-arm-4.patch
```
* Apply ipipe core post-patch
```
cd linux-rpi-3.8.y
patch -Np1 < ../xenomai-head/ksrc/arch/arm/patches/raspberry/ipipe-core-3.8.13-raspberry-post-2.patch
```
* Create build directory
```
cd <working dir>
mkdir linux-rpi-3.8.y/build
```
* Configure kernel
```
cp rpi_xenomai_config linux-rpi-3.8.y/build/.config
cd linux-rpi-3.8.y
make mrproper
make ARCH=arm O=build oldconfig
```
* Compile Linux Kernel (此步驟耗時長,建議用make -j平行加速)
在作此步驟之前須export library
```
export PATH=<working dir(full path)>/tools-master/arm-bcm2708/arm-bcm2708hardfp-linux-gnueabi/bin/:$PATH
make ARCH=arm O=build CROSS_COMPILE=<working dir(full path)>/tools-master/arm-bcm2708/arm-bcm2708hardfp-linux-gnueabi/bin/arm-bcm2708hardfp-linux-gnueabi-
```
* Install modules
```
make ARCH=arm O=build INSTALL_MOD_PATH=dist modules_install
```
* Install headers
```
make ARCH=arm O=build INSTALL_HDR_PATH=dist headers_install
find build/dist/include \( -name .install -o -name ..install.cmd \) -delete
```
* 編譯好的kernelImage(<working dir>/linux-rpi-3.8.y/build/arch/arm/boot/Image),移到SD卡的 ``/boot/`` 路徑下並更改名稱為kernel.img
* 將``linux-rpi-3.8.y/build/dist``中的Module,移到SD卡中的``/lib/modules``
* Compile Xenomai
```
cd xenomai-head
export PATH=<working dir(full path)>/tools-master/arm-bcm2708/arm-bcm2708hardfp-linux-gnueabi/bin/:$PATH
./configure --host=arm-bcm2708hardfp-linux-gnueabi
cd src
mkdir dist
make install DESTDIR=`pwd`/dist
```
* dist中會出現``usr/xenomai``, 將這個資料夾移到sd卡中 ``/usr/``
* 用 minicom 連進 raspberry pi 中執行以下動作
```
export PATH=/usr/xenomai/bin:$PATH
export LD_LIBRARY_PATH=/usr/xenomai/lib
sudo modprobe xeno_posix
```
## Xenomai 3 on raspberry pi
* 取得 xenomai 3.0-rc、rpi-linux 3.18.y、ipipe 3.18.12 arm patch、toolchain
```
git clone -b rpi-3.18.y git://github.com/raspberrypi/linux.git rpi-linux
git clone -b v3.0-rc4 git://git.xenomai.org/xenomai-3.git xenomai-3
wget http://download.gna.org/adeos/patches/v3.x/arm/ipipe-core-3.18.12-arm-1.patch
git clone https://github.com/raspberrypi/tools.git --depth=1
```
* checkout rpi-linux至3.18.12
```
git checkout c963de6d8caec6278c0dde76831f9fdab5bace52
git checkout -b 3.18.12
```
* 由此處取得rpi post patch
[post patch](https://drive.google.com/file/d/0B6GwSked9fL9RnU3b3pSajFZbUk/view)
* 上 ipipe patch
```
cd rpi-linux
../xenomai-3/scripts/prepare-kernel.sh --arch=arm --ipipe=<你的patch位置>/ipipe-core-3.18.12-arm-1.patch --linux=.
```
* ipipe post patch (註:pre patch為解決ipipe patch衝突之用,此處無衝突故不需要)
```
patch -Np1 < <你的patch位置>/3.18.12-xenomai3-temp.patch
```
* configure kernel(使用rpi提供的default)
```
export CCPI=($working_dir)/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/arm-linux-gnueabihf-
mkdir build
make mrproper
make ARCH=arm O=build CROSS_COMPILE=$CCPI bcmrpi_defconfig
make ARCH=arm O=build CROSS_COMPILE=$CCPI menuconfig
```
若patch正確,會在設定表裡看到xenomai相關選項。
使用manuconfig或編輯build/.config,找到CONFIG_CPU_FREQ , CONFIG_CPU_IDLE , CONFIG_KGDB , CONFIG_CONTEXT_TRACKING_FORCE(若有的話)設為n。
* compile kernel
```
make -j 5 ARCH=arm O=build CROSS_COMPILE=$CCPI
```
* 安裝kernel modules
```
make ARCH=arm O=build INSTALL_MOD_PATH=dist modules_install
```
* 安裝headers
```
make ARCH=arm O=build INSTALL_HDR_PATH=dist headers_install
```
* xenomai
```
cd ../xenomai-3
mkdir dist
export PATH=/home/erickitten/workspace/xenomai/pi/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/:$PATH
```
* 設定bootstrap
```
./scripts/bootstrap --with-core=cobalt –enable-debug=partial
```
* configure
```
./configure CFLAGS="-mcpu=arm1176jzf-s -mfpu=vfp -mfloat-abi=hard" LDFLAGS="-mcpu=arm1176jzf-s -mfpu=vfp -mfloat-abi=hard" --host=arm-linux-gnueabihf --with-core=cobalt
```
* install
```
make DESTDIR=`pwd`/dist install
```
* 複製kernel
將linux-rpi/build/arch/arm/boot/Image複製到SD卡的/boot (partition),並改名成kernel.img。或使用config.txt,以kernel=<filename>指定名稱。
* 移動module / patches (權限問題,需使用sudo)
```
cd ..
sudo cp -r rpi-linux/build/dist/lib/modules $(sdcard)/lib
sudo cp -r xenomai-3/dist/usr/xenomai $(sdcard)/usr
```
## Beaglebone Black 環境設置
使用舊版linux(Angstrom)來做測試,核心編譯步驟參考上面步驟 或 http://elinux.org/EBC_Installing_Kernel_Source
* 下載Kernel Source & 編譯
```
host$ git clone git://github.com/RobertCNelson/bb-kernel.git
host$ cd bb-kernel
host$ git tag (This shows what versions can be checked out.)
host$ git checkout 3.8.13-bone67 -b 3.8.13-bone67
```
* 預設username/password
```
host$ ./build_kernel.sh
username:root
```
* 設定cross compile
在Kernel Configuration中選擇General setup,輸入
```
CROSS_COMPILE=arm-linux-gnueabi-
```
* 安裝必要套件
```
sudo apt-get update
sudo apt-get install build-essential device-tree-compiler fakeroot lzma lzop u-boot-tools libncurses5-dev:amd64 libc6:i386 libncurses5:i386 libstdc++6:i386 zlib1g:i386
```
* 完成上述步驟後即可上電,按 boot select button 讓它從 sd card 開機,開機後進入登入畫面,帳號/密碼寫在上面
* 登入後查詢版本
```
sudo su
uname -a
```
## Xenomai 2.6 on Beaglebone
Kernel裝好後,測試可以成功從 SD 卡開機,接著更換換 Kernel
參考資料 http://elinux.org/EBC_Xenomai 與 http://emplearn.blogspot.tw/search?q=xenomai
* 設定路徑
```
mkdir bbb
cd bbb
export BBB=$(pwd)
```
* 取得xenomai-2.6.4 (與 beaglebone-kernel 同一層目錄)
```
wget http://download.gna.org/xenomai/stable/latest/xenomai-2.6.4.tar.bz2
```
* 檢查版本
```
cd bb-kernel/KERNEL
uname -a
git tags | sort | less
```
* 選擇跟所編譯 Kernel 最接近版本,在此為 3.8.13
```
git checkout 3.8.13-bone67 -b xenomai
```
* Patch the kernel
```
cd bb-kernel/KERNEL
patch -p1 < ../../xenomai-2.6.4/ksrc/arch/arm/patches/beaglebone/ipipe-core-3.8.13-beaglebone-pre.patch
patch -p1 < ../../xenomai-2.6.4/ksrc/arch/arm/patches/ipipe-core-3.8.13-arm-4.patch
patch -p1 < ../../xenomai-2.6.4/ksrc/arch/arm/patches/beaglebone/ipipe-core-3.8.13-beaglebone-post.patch
```
* Prepare the kernel
```
cd ../../xenomai-2.6.4/scripts
./prepare-kernel.sh --arch=arm --linux=../../bb-kernel/KERNEL/
```
* Prepare the kernel
```
cd ../../bb-kernel
```
* 確認已經關掉AUTO_BUILD
```
vi system.sh
```
* 確認最後一行為
```
#AUTO_BUILD=1
```
* 關掉 CPU Power Management ---> CPU Frequency scaling中的 [ ] CPU Frequency scaling.
* 將Real-time sub-system ---> Drivers ---> Testing drivers中的選項全部打開
```
cd ../../bb-kernel/KERNEL
make ARCH=arm menuconfig
```
* 再重新編譯
```
make -j8 ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- LOADADDR=0x80008000 uImage dtbs modules
```
* 編譯完後將 SD 卡內的 Kernel 換掉
```
mkdir sd
```
* 掛載 sd 卡
* 確認掛載的目錄內一定要有這些路徑
```
sudo mount /dev/mmcblk0p1 sd
sudo cp beagle-kernel/kernel/arch/arm/boot/uImage sd/boot/uImage-3.8.13
cd beagle-kernel/kernel
sudo make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- INSTALL_MOD_PATH=$BBB/sd modules_install
cd -
mkdir sd/home/root/xeno_drivers
cp beagle-kernel/kernel/drivers/xenomai/testing/*.ko sd/home/root/xeno_drivers/
cp -r xenomai-2.6.3 sd/home/root
./configure --target=arm-linux-gnueabi
mkdir -p dist; make DESTDIR=`pwd`/dist install
```
* 將編譯後dist內的內容複製放到beaglebone上
```
sudo umount sd
```
* 測試,掛載driver
```
cd ~/xeno_drivers
insmod xeno_klat.ko
/usr/xenomai/bin/cyclictest -p 90
```
## Xenomai 3 on Beaglebone Black
* 先下載 linux kernel:
- 參考資料 : http://elinux.org/EBC_Installing_Kernel_Source
```
git clone git://github.com/RobertCNelson/bb-kernel.git
cd bb-kernel
git tag (This shows what versions can be checked out.)
git checkout 3.18-rc7 -b 3.18-rc7
./build_kernel.sh
```
* Prepare the kernel
```
cd ../../xenomai-2.6.4/scripts
./prepare-kernel.sh --arch=arm --linux=../../bb-kernel/KERNEL/
```
* Compile Kernel
```
cd ../../bb-kernel
```
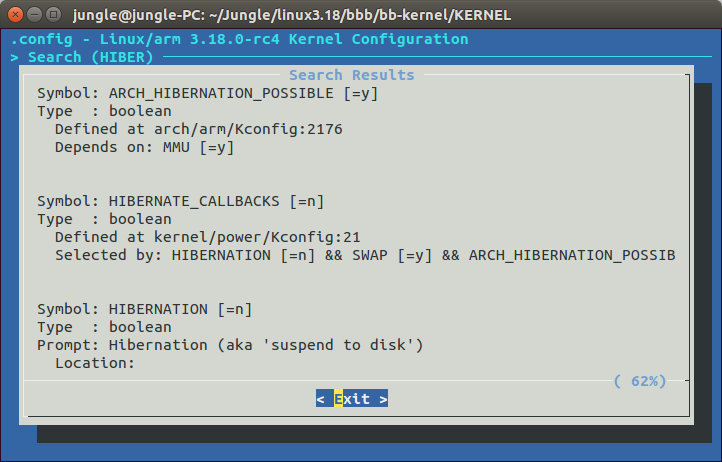
* 確認狀態,關掉休眠
- 關掉 CPU Power Management ---> CPU Frequency scaling中的 [ ] CPU Frequency scaling.
- 將Real-time sub-system ---> Drivers ---> Testing drivers中的選項全部打開
```
make ARCH=arm menuconfig
```
* 再重新編譯
```
make -j 8 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- LOADADDR=0x80008000 uImage dtbs modules
```
* 把 SD card format 並 燒錄 debian (要進入 root 模式)
```
sudo mkfs -t ext4 /dev/mmcblk0
sudo xz -dkc bone-debian-7.5-2014-05-14-2gb.img.xz > /dev/mmcblk0
```
* 把dtb file (or dts) and zImage 換掉,把 zImage 放入到 SD card 內
就可以成功開機了!
* 然後去下載 Xenomai3.git
- 參考資料 :http://git.xenomai.org/xenomai-3.git
```
wget http://git.xenomai.org/xenomai-3.git/snapshot/xenomai-3-3.0-rc4.tar.bz2
tar jxvf xenomai-3-3.0-rc4.tar.bz2
wget http://download.gna.org/adeos/patches/v3.x/arm/ipipe-core-3.18.12-arm-1.patch //載 ipipe patch
cd bb-kernel/KERNEL
patch -p1 < ../../ipipe-core-3.18.12-arm-1.patch
```
* Compile Xenomai 3
```
cd xenomai-3-3.0-rc4
mkdir dist
export PATH=/home/neal/Xenomai/tool-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/:$PATH
./scripts/bootstrap --with-core=cobalt –enable-debug=partial
./configure CFLAGS="-march=armv7-a -mtune=cortex-a8 -mfloat-abi=hard -mfpu=neon -ffast-math" --host=arm-linux-gnueabihf --target=arm-linux-gnueabihf
mkdir -p dist; make DESTDIR=`pwd`/dist install
```
* dist中會出現usr/xenomai, 將這個資料夾移到sd卡中 /usr/
* Install module :
```
cd bb-kernel/KERNEL
mkdir dist
sudo make ARCH=arm INSTALL_MOD_PATH=dist modules_install
```
* 把 modules 移到 SD card /lib/modules 內
```
sudo cp -rp dist/lib/modules/3.18.0-rc7+/ /media/neal/rootfs/lib/modules/
```
* 即可成功 run xenomai 3 的 內建執行檔.
- ex : sudo /usr/xenomai/bin/arm-linux-gnueabihf-latency
## **Xenomai 3 on Raspberry Pi 3**
### linux 核心部份
1. 下載 raspberrypi linux kernel source
```
$ git clone https://github.com/raspberrypi/linux.git
$ git checkout rpi-4.1.y
```
為了配合xenomai最新版本只支援linux kernel 4.1
2. 下載 xenomai3 source
```
$ git clone http://git.xenomai.org/xenomai-3.git/
$ git checkout v3.0.2
```
4.1.18的patch檔只有3.0.2之後才有
3. 下載 xenomai3 on bcm2709 patch
```
$ wget http://wiki.csie.ncku.edu.tw/_showraw/patch-xenomai-3-on-bcm-2709.patch
```
4. Patch Xenomai 到 Linux kernel 中
```
$ cd xenomai-3
$ scripts/prepare-kernel.sh --linux=../linux/ --ipipe=kernel/cobalt/arch/arm/patches/ipipe-core-4.1.18-arm-4.patch --arch=arm
```
5. 打入xenomai3 on bcm2709 patch
```
$ cd linux
$ cat ../patch-xenomai-3-on-bcm-2709.patch | patch -p1
```
6. 修改linux組態
```
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcm2709_defconfig
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig
```
修改下列組態([ ]為不選,[X]為選取):
```
CPU Power Management --->
CPU Frequency scaling --->
[ ] CPU Frequency scaling
CPU idle --->
[ ] CPU idle PM support
Kernel Features --->
[ ] Contiguous Memory Allocator
[ ] Allow for memory compaction
Kernel Hacking --->
[ ] KGDB: kernel debugger
Boot options --->
Kernel command line type --->
[X] Extend bootloader kernel arguments
```
7. 開始編譯核心
```
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs
```
使用 -jx 來建立x個thread平行編譯
8. 輸出編譯完的模組
```
$ mkdir dist
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- INSTALL_MOD_PATH=dist modules_install
```
9. 複製 zImage 及 device tree 至 SD 卡上
```
$ cp arch/arm/boot/zImage /media/${USER}/boot
$ cp arch/arm/boot/dts/bcm2710-rpi-3-b.dtb /media/${USER}/boot
$ rm -rf /media/${USER}/boot/overlays/*
$ cp arch/arm/boot/dts/overlays/*.dtb* /media/${USER}/boot/overlays/
```
10. 複製模組至 SD 卡上
```
# sudo cp -r linux/dist/lib/modules/* /media/${USER}/${ROOTFS}/lib/modules
```
11. 修改 /boot/config.txt
內文最後加上
```
kernel=${zImage name}
device_tree=bcm2710-rpi-3-b.dtb
```
### Xenomai cobalt 核心部份
1. cobalt kernel 參數設定
```
$ cd xenomai-3
$ ./scripts/bootstrap --with-core=cobalt –enable-debug=partial
$ ./configure CFLAGS="-march=armv7-a -mtune=cortex-a8 -mfloat-abi=hard -mfpu=neon -ffast-math" --host=arm-linux-gnueabihf --target=arm-linux-gnueabihf --enable-smp
```
2. 編譯
```
$ make DESTDIR=${PWD}/target install
```
3. 放入 SD 卡中
```
$ sudo cp -a target/* /media/${USER}/${ROOTFS}/
```
All Done!!
觀察與分析
=====================================================================
```
pi@raspberrypi:~$ cat /proc/xenomai/stat
CPU PID MSW CSW PF STAT %CPU NAME
0 0 0 206 0 00500080 100.0 ROOT
0 0 0 2688553 0 00000000 0.0 IRQ3: [timer]
```
* CPU : 目前這個tread是使用哪個CPU在運行,而rpi是單核心CPU,故顯示皆為0
* MSW : Mode SWitches, This value should only increase over time for threads that are expected to interact with Linux services.
- 當process從primary mode轉成secondary mode或是secondary mode轉成primary mode時,將會紀錄一次的轉換。
- cyclictest的RT task因為會執行到memset,所以會從xenomai schedule跳到linux schedule,MSW+1,而執行完memset後將在跳回xenomai schedule,故再+1
* CSW : Number of Context SWitches (or IRQ hits for the particular CPU)
* PF : Number of Page Faults (should stop increasing as soon as mlockall is in effect)
* STAT : A bitfield describing the internal state of the thread. Bit values are defined in include/nucleus/thread.h (See status and mode bits). The STAT field from /proc/xenomai/sched gives a 1-letter-per-bit symbolic translation of a the most significant subset of those bits.
* %CPU : CPU share of the thread (or IRQ handler) since the last retrieval of the statistics.
* NAME : Name of the thread (or IRQ number and registered driver). Can be set, e.g., with the (non portable) POSIX-API-function pthread_set_name_np. See API documentation of the RTOS skin in question.
```
pi@raspberrypi:~$ sudo /usr/xenomai/bin/cyclictest >/dev/null 2>/dev/null &
[1] 2253
```
```
pi@raspberrypi:~$ ps aux | grep -i "cy"
root 2253 0.5 0.3 4580 1464 ? S 03:34 0:00 sudo /usr/xenomai/bin/cyclictest
root 2254 2.7 0.4 2340 2132 ? SLl 03:34 0:00 /usr/xenomai/bin/cyclictest
pi 2259 0.0 0.1 3540 820 ttyAMA0 S+ 03:34 0:00 grep --color=auto -i cy
```
```
pi@raspberrypi:~$ cat /proc/xenomai/stat
CPU PID MSW CSW PF STAT %CPU NAME
0 0 0 255 0 00500080 100.0 ROOT
0 2254 1 1 0 00b00380 0.0 cyclictest
0 2256 2 48 0 00300184 0.0 cyclictest
0 0 0 2913946 0 00000000 0.0 IRQ3: [timer]
```
```
pi@raspberrypi:~$ watch -n 1 cat /proc/xenomai/stat
Every 1.0s: cat /proc/xenomai/stat Wed Jan 8 03:38:43 2014
CPU PID MSW CSW PF STAT %CPU NAME
0 0 0 442 0 00500080 99.9 ROOT
0 2254 1 1 0 00b00380 0.0 cyclictest
0 2256 2 235 0 00300184 0.0 cyclictest
0 0 0 2953543 0 00000000 0.1 IRQ3: [timer]
```
在這邊可以看到cyclictest有兩個pid,因為/usr/xenomai/bin/cyclictest它會先創一個thread,並讓這個thread跑nanosleep,所以會有兩個process。接著看向CSW,pid 2254的cyclictest, 他的CSW只有1。pid 2256的卻有235,這是因為2256是一個xenomai realtime task,而 2254是一個 linux的process,所以2256會優先執行,直到realtime task都做完才會換low priority的linux domain process取得CPU,因此2254的CSW值才會是1而沒有增加。
```
pi@raspberrypi:~$ sudo kill 2254
pi@raspberrypi:~$ ps aux | grep -i "cy"
pi 2324 0.0 0.1 3540 820 ttyAMA0 R+ 03:46 0:00 grep --color=auto -i cy
[1]+ Done sudo /usr/xenomai/bin/cyclictest > /dev/null 2> /dev/null
pi@raspberrypi:~$ sudo /usr/xenomai/bin/cyclictest -p FIFO >/dev/null 2>/dev/null &
```
* 在我們了解MSW時,嘗試了在-p後面加上了文字(如:FIFO、RR……)
* 發現MSV的值開始往上增加,也發現一開始對於MSW的定義理解錯誤
```
CPU PID MSW CSW PF STAT %CPU NAME
0 0 0 75266 0 00500080 99.9 ROOT
0 2978 1 1 0 00b00380 0.0 cyclictest
0 2980 2 26846 0 00300184 0.0 cyclictest
0 7559 1 1 0 00b00380 0.0 cyclictest
0 7561 66 130 0 00b00184 0.0 cyclictest
0 0 0 11266931 0 00000000 0.1 IRQ3: [timer]
```
* trace後才了解,這是xenomai在-p的指令上是使用atoi,將輸入的數字轉為int,但並沒有進行偵錯,才導致segment fault,而需跳轉到linux domain進行除錯。
## 效能表現
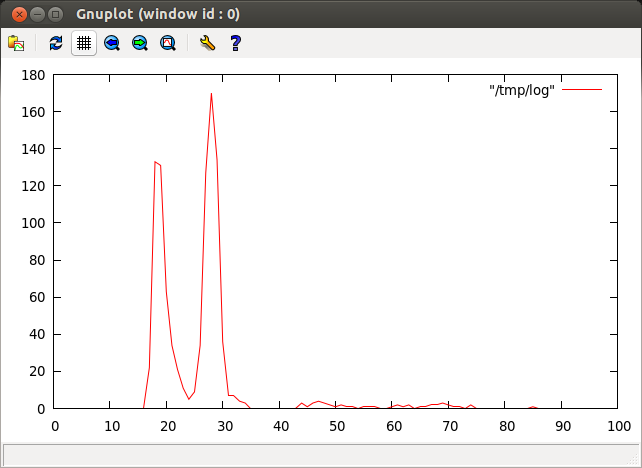
* Stock Linux
```
cyclictest -p 90 - m -c 0 -i 200 -n -h 100 -q -l 1000 >log
```
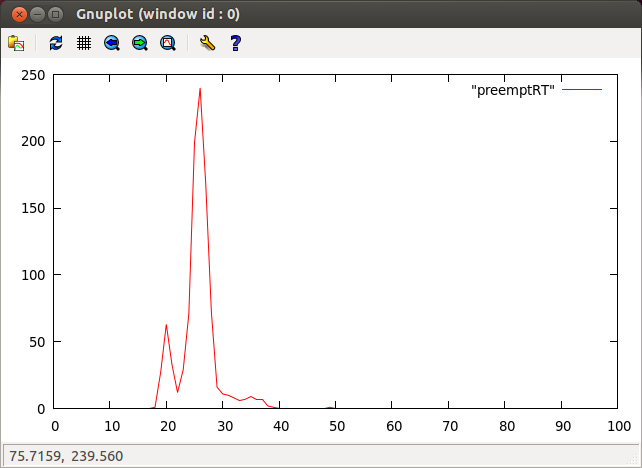
* PREEMPT_RT-patched Linux
```
cyclictest -p 90 - m -c 0 -i 200 -n -h 100 -q -l 1000 >log
```
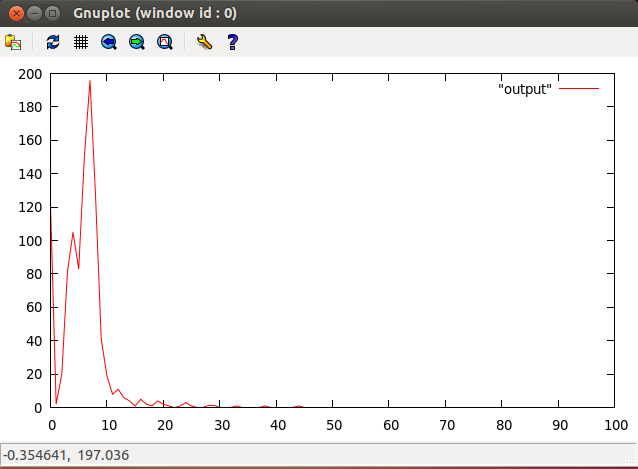
* Xenomai-patched Linux
```
/usr/xenomai/bin/cyclictest -p 90 - m -c 0 -i 200 -n -v 100 -q -l 100" >log
```
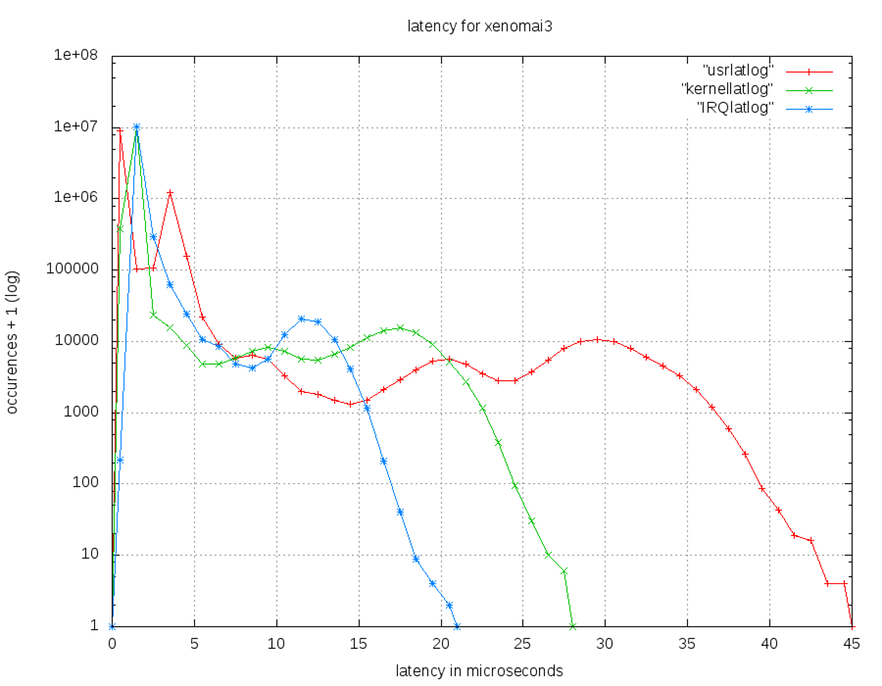
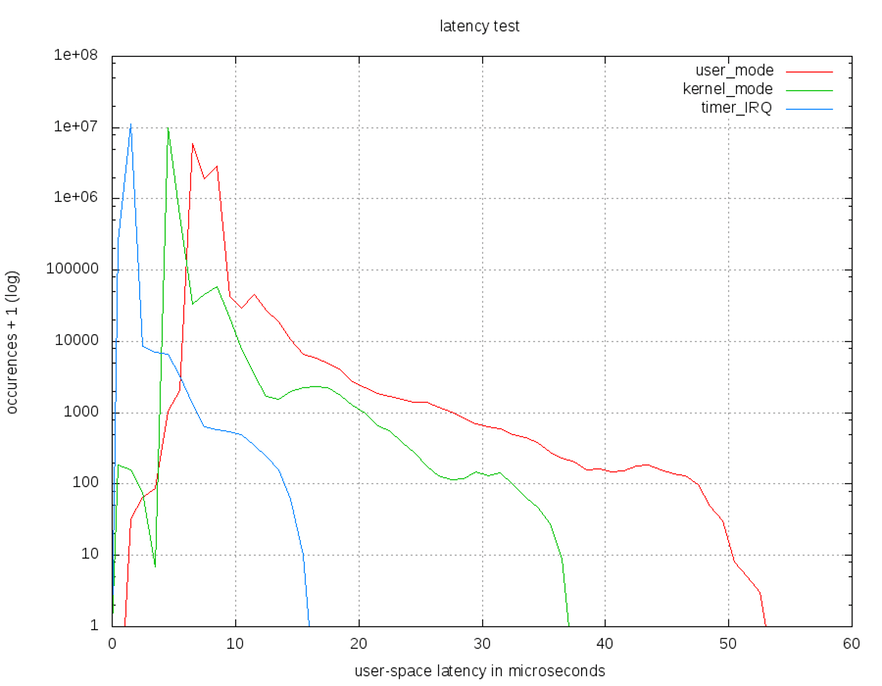
* User,kernal,timer IRQ 在R-pi上使用Xenomai 2.6與Xenomai 3.0之比較圖
- Xenomai 3.0
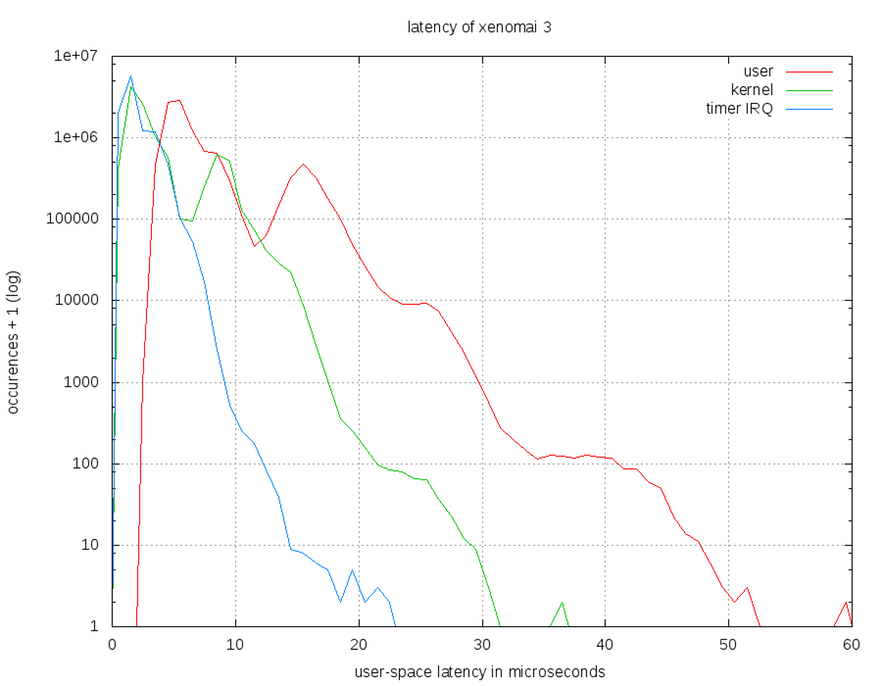
- Xenomai 2.6
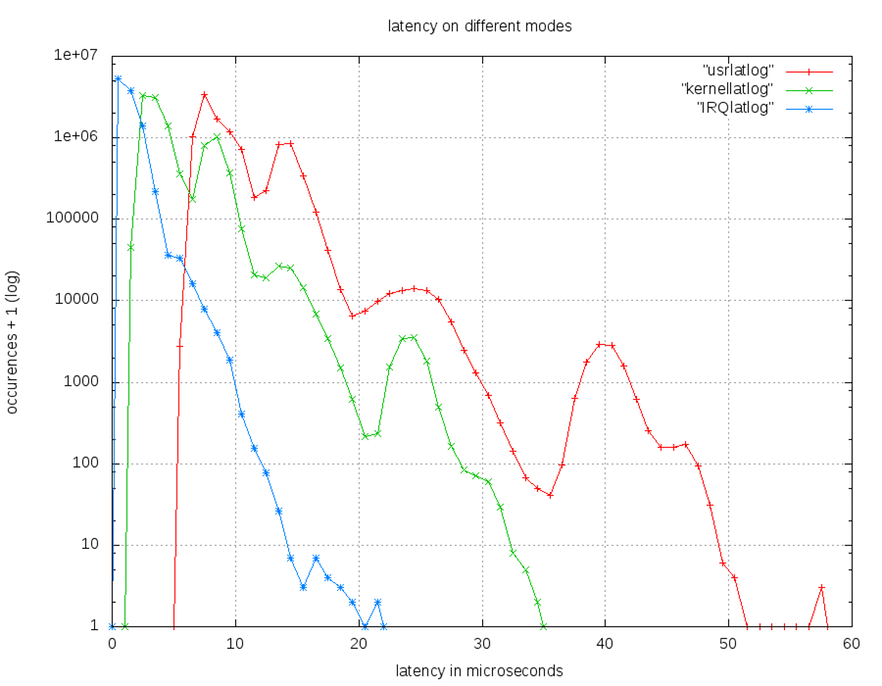
* User,kernal,timer IRQ 在Beaglebone上使用Xenomai 2.6與Xenomai 3.0之比較圖
- Xenomai 3.0
- Xenomai 2.6
## Cyclictest 原理
* 概念:設定一個時間間隔->取得現在時間->讓process 睡一個間隔->process醒來後再取一次時間->比對兩次取得的時間差與設定的間隔差距
* pseudocode:
```c
clock_gettime((&now))
next = now + par->interval
while (!shutdown) {
clock_nanosleep((&next))
clock_gettime((&now))
diff = calcdiff(now, next)
# update stat-> min, max, total latency, cycles
# update the histogram data
next += interval
}
```
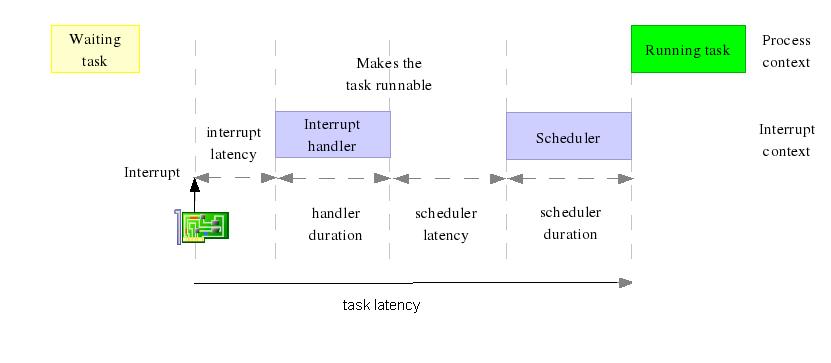
造成這時間差的可能原因:
* 造成時間差的原因
timer精準度
- timer精準度
- IRQ latency
- IRQ handler duration
- scheduler latency
- scheduler duration
interrupt latency
interrupt handler duration
* Cyclictest 實作流程
scheduler latency
1.cyclictest建立一個timerthread, 它一個 realtime 的 thread
scheduler duration
2.timerthread會重複的執行取第一次時間 nanosleep(interval) 取第二次時間 比對兩次時間差與interval的差異
context switch
3.最後將結果輸出在terminal
討論用
======
https://embedded2014.hackpad.com/Xenomai-raspberry-note-XwJtuQn9nkD
組員
====
* 向澐
* 林家宏
* 呂科進
* 趙愷文
* 阮志偉
* 陳建霖
* Clock_nanosleep 的 timer
clock_nanosleep 使用的timer 是 high resolution timer(HRT) ,讓睡眠時間可以更精確,達到nanosecond的精準度(但還是要看硬體能提供的精準度)
因為能在更準確得時間讓process醒來並取的nanoscecond單位的時間 所以可以計算到由systick無法計算到的duration + latency
* Clock_nanosleep 實作流程
1.使用 spinlock (xnlock_get_irqsave) 令 CPU 不接受 Interrupt
2.使用 xnpod_suspend_thread 改變目前 thread 的狀態
3.使用 xntimer_get_timeout_stopped 取得 tick
4.使用 ticks2ts 轉換時間單位
```c
int clock_nanosleep (clockid_t clock_id, int flags, const struct timespec *rqtp, struct timespec *rmtp)
{
xnthread_t *cur;
spl_t s;
int err = 0;
if (xnpod_unblockable_p())
return EPERM;
if (clock_id != CLOCK_MONOTONIC && clock_id != CLOCK_REALTIME)
return ENOTSUP;
if ((unsigned long)rqtp->tv_nsec >= ONE_BILLION)
return EINVAL;
if (flags & ~TIMER_ABSTIME)
return EINVAL;
cur = xnpod_current_thread();
xnlock_get_irqsave(&nklock, s);
thread_cancellation_point(cur);
xnpod_suspend_thread(cur, XNDELAY, ts2ticks_ceil(rqtp) + 1,clock_flag(flags, clock_id), NULL);
thread_cancellation_point(cur);
if (xnthread_test_info(cur, XNBREAK)) {
if (flags == 0 && rmtp) {
xnsticks_t rem;
rem = xntimer_get_timeout_stopped(&cur->rtimer);
xnlock_put_irqrestore(&nklock, s);
ticks2ts(rmtp, rem > 1 ? rem : 0);
} else
xnlock_put_irqrestore(&nklock, s);
return EINTR;
}
xnlock_put_irqrestore(&nklock, s);
return err;
}
```
* [Cyclictest](https://rt.wiki.kernel.org/index.php/Cyclictest)
* Test case: POSIX interval timer, Interval 500 micro seconds,. 100000 loops, 100% load.
- Commandline:
```
cyclictest -t1 -p 80 -i 500 -l 100000
```
* 使用 PREEMPT LINUX
```
root@raspberrypi:/home/pi# sudo ./cyclictest -t1 -p 80 -i 500 -l 100000
# /dev/cpu_dma_latency set to 0us
policy: fifo: loadavg: 0.00 0.01 0.05 1/61 2064
T: 0 ( 2063) P:80 I:500 C: 100000 Min: 27 Act: 49 Avg: 42 Max: 1060
```
* 使用 RT-PREEMPT
```
Linux raspberrypi 3.6.11+ #474 PREEMPT Thu Jun 13 17:14:42 BST 2013 armv6l GNU/Linux
Min: 22 Act: 31 Avg: 32 Max: 169
```
* 使用 Xenomai
```
Linux raspberrypi 3.8.13-core+ #1 Thu Feb 27 03:02:16 CST 2014 armv6l GNU/Linux
Min: 1 Act: 5 Avg: 6 Max: 41
```
```
root@raspberrypi:/home/pi# /usr/xenomai/bin/cyclictest -t1 -p 80 -i 500 -l 10000
0.08 0.06 0.05 1/61 2060
T: 0 ( 2060) P:80 I: 500 C: 100000 Min: -4 Act: -2 Avg: 0 Max: 30
```
T:thread
P:priority
I:interval
C:執行cycle數
Min:最小延遲
Act:此次延遲時間
Avg:平均延遲
Max:最大延遲
最重要的是Max值 為了確保realtime 要能知道worst case,讓開發者可以評估最差的情況可以在多少時間內可以做出回應
* 比較Cyclictest 於使用 PREEMPT LINUX,RT-PREEMPT以及Xenomai
- 使用R-pi model B+ , Xenoami 2.6.4
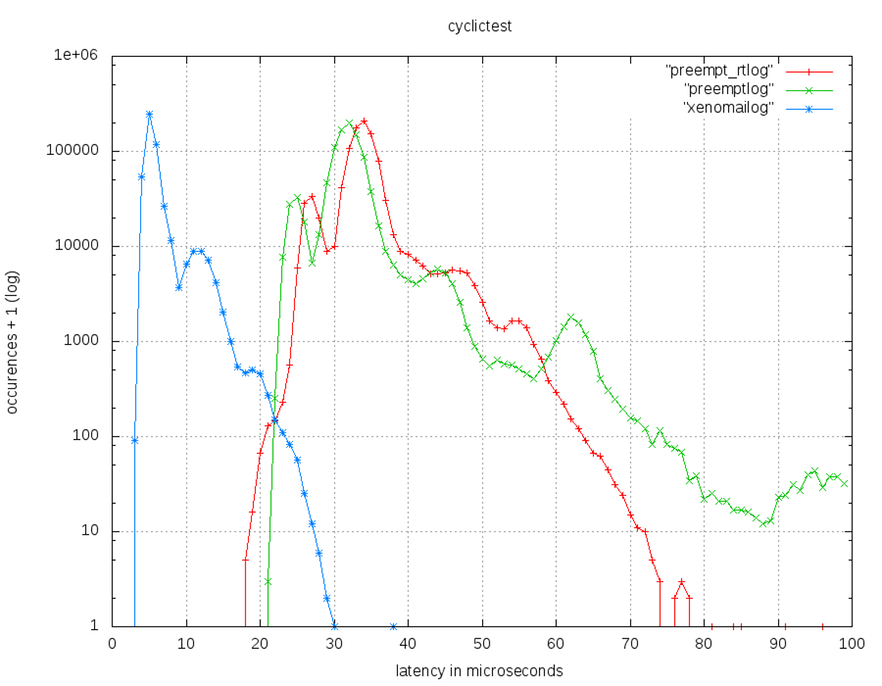
- 實驗數據
| Kernel Type | Max latency(µs) |
|:----------------|:----------------|
| Linux preempt | 271 |
| Full preempt_rt | 96 |
| Xenomai 2.6.4 | 38 |
## 示波器 實驗
試著撰寫driver驅動板子,進而使用示波器測試latency,驗證在不同因素之下造成不同的 max latency
* Source code
https://github.com/jacky6016/GPIO-test
https://github.com/erickitten/GPIO_test_xenomai3_2
* 實驗數據
+----------------------------------+---------------+
| Driver model |max latency(µs)|
+==================================+===============+
| rpi xenomai-2 RTDM | 4.71 |
+----------------------------------+---------------+
| beaglebone xenomai-2 RTDM | 7.46 |
+----------------------------------+---------------+
| rpi xenomai-3 RTDM | 7.022 |
+----------------------------------+---------------+
| rpi xenomai-2 linux native | 10.92 |
+----------------------------------+---------------+
| rpi xenomai-2 user-level(python) | 244 |
+----------------------------------+---------------+
* [詳細實驗紀錄](https://embedded2015.hackpad.com/Xenomai-lab-data-FlbetsD4sEe/)
展示
=====================================================================
在 RPi B+ 上結合 Xenomai 3 的成果:[CNC 繪圖機](https://www.youtube.com/watch?v=w77D1Mrx1yo)
Q&A
=====================================================================
* Q1:handler duration 與 schedule latency 之間的延遲原因為何?
- A:
* Q2:ipipe的效益為何?為什麼要切割damain?切割完要如何確保real-time的穩定速度?
- A:
ipipe的主要效益是用來切割domain,讓real-time和linux interrupt可以在不同domain下進行運作。
切割domain原因是因為real-time domain的優先序是最高的,當有real-time interrupt進來,就會直接進入real-time domain去執 行,不會在經過整個linux的複雜架構下進行preempt的動作,可確保real-time 能在短時間內進行處理。
* Q3:ipipe/Adeos理論基礎中的Fine-grained是什麼?
- A:
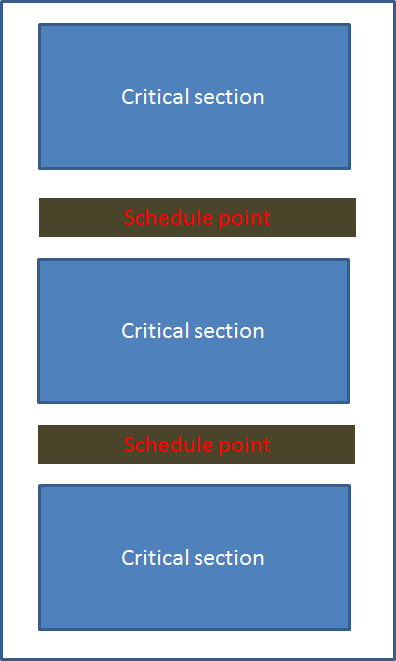
在[life with andeos ](http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.45.5628&rep=rep1&type=pdf)這篇指的fine-grained linux kernel,是指在編寫linux kernel code時,盡量讓critical section能愈短愈好,確保當real-time thread running in the secondary domain能在一定時間內遇到schedule point,也就可以在schedule point處理real-time thread。
* Q4:ipipe的相關檔案,gic.c、it8152.c ... 之類的有什麼關係?
- A:
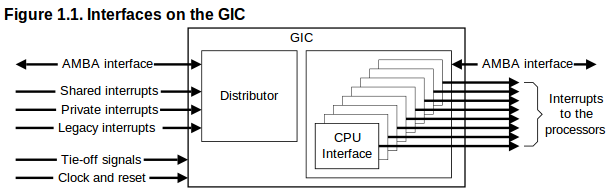
* Q5:請解釋下圖
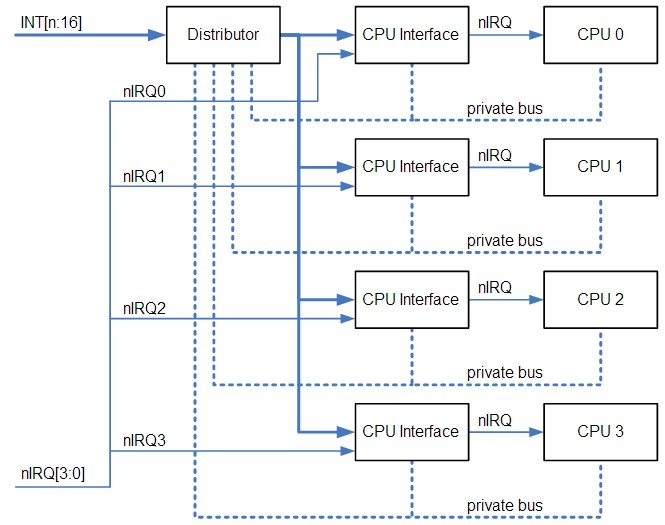
- A:
GIC:Generic Interrupt Controller(GIC)是arm用來集中分配interrupt至cpu的裝置。它主要分為distributor與cpu interfaces.
distributor:負責分配interrupts,紀錄執行狀態,並提供registers以決定每個interrupt的enable、priority level、target processor。每個interrupt會有固定的interrupt ID,以供接收的cpu辨認。
cpu interface:向cpu傳送interrupt request,並提供distributor接收(acknowledge)interrupt、完成interrupt等訊息;它也提供決定priority mask、preemption policy的registers。
當啟動時,cpu interface會收到priority最高的pending interrupt,並決定它是否有足夠的priority被此cpu執行(參考mask、running interrupt、preemption),若是則signal cpu。cpu讀取interface的register(GICC_HPPIR)以接收interrupt,此讀取會得到interrupt ID,當接收後 distributor會改變狀態(由pending->active(and pending));完成之後,cpu寫入register以示意interrupt已經完成。
Interrupt types:
* Private Peripheral Interrupt (PPI) ID:16-31
每個cpu各自獨立的硬體interrupt。
* Shared Peripheral Interrupt (SPI) ID:32~1019
外部硬體interrupt。
* Software-generated interrupt (SGI) ID:0~15
軟體interrupt,由一個cpu發出,可指定至一個或多個cpu,cpu以寫入GICD_SGIR的方式產生SGI,其中PPI與SGI是N-N model,每個cpu的interrupt狀態各自獨立;SPI是1-N model,一旦其中一個目標cpu接受,interrupt即視為已處理。
* Q6:Xenimai2與Xenomai3架構圖
- A:
* Q7:要如何知道每個CPU上跑哪一個task? SMP是如何排程?
- A:
對CPU來講 thread, process都是程式(program),一如作業系統,CPU只是在其間跳來跳去;有一個 load balancer 會定期得去處理 Processor 間的 Balance 會將 loading 較重的 Processor 內的工作移到 Loading 較輕的 Processor 上去執行,其中會用到 Processor 間的 interrupt 這種 interrupt 叫 IPI (inter-processor interrupt)
* inter-processor interrupt (IPI):
IPI is a special type of interrupt by which one processor may interrupt another processor in a multiprocessor system if the interrupting processor requires action from the other processor.
* PPI :
An interrupt generated by a peripheral.
共筆編輯紀錄
=====================================================================
## 2016 紀錄
* 開發紀錄:[https://embedded2016.hackpad.com/-in-Xenomai-5zH4JsNDgO5](https://embedded2016.hackpad.com/-in-Xenomai-5zH4JsNDgO5)
## 2015 紀錄
* 開發紀錄:[https://embedded2015.hackpad.com/Xenomai-LydARMEzEWP](https://embedded2015.hackpad.com/Xenomai-LydARMEzEWP)
## 2014 紀錄
* 討論&紀錄:[https://embedded2014.hackpad.com/Xenomai-raspberry-note-XwJtuQn9nkD](https://embedded2014.hackpad.com/Xenomai-raspberry-note-XwJtuQn9nkD)
* 整理:[https://embedded2014.hackpad.com/Xenomai-z2CJPjPLTer](https://embedded2014.hackpad.com/Xenomai-z2CJPjPLTer)
參考資料
=======
* https://code.google.com/p/picnc/wiki/RPiXenomaiKernel
* https://code.google.com/p/picnc/wiki/CreateRaspbianLinuxCNC
* http://www.camelsoftware.com/firetail/blog/raspberry-pi/real-time-operating-systems/
* `Quadruped Linux robot feels its way over obstacles<http://linuxgizmos.com/hyq-quadruped-robot-runs-real-time-linux/>`_
* ` Choosing between Xenomai and Linux for real-time applications<https://www.osadl.org/fileadmin/dam/rtlws/12/Brown.pdf>`_
* `Real Time Systems<http://www.slideshare.net/anil_pugalia/real-time-systems>`_
* `http://www.cs.ru.nl/lab/xenomai/exercises/`_
=====================================================================
* [Life with Adeos](https://xenomai.org/2014/06/life-with-adeos/)
* [Fast Interrupt Priority Management in Operating System Kernel](http://www.dtic.mil/dtic/tr/fulltext/u2/a266638.pdf)
* [https://code.google.com/p/picnc/wiki/RPiXenomaiKernel](https://code.google.com/p/picnc/wiki/RPiXenomaiKernel)
* [https://code.google.com/p/picnc/wiki/CreateRaspbianLinuxCNC](https://code.google.com/p/picnc/wiki/CreateRaspbianLinuxCNC)
* [http://www.camelsoftware.com/firetail/blog/raspberry-pi/real-time-operating-systems/](http://www.camelsoftware.com/firetail/blog/raspberry-pi/real-time-operating-systems/)
* [Quadruped Linux robot feels its way over obstacles](http://linuxgizmos.com/hyq-quadruped-robot-runs-real-time-linux/)
* [ Choosing between Xenomai and Linux for real-time applications](https://www.osadl.org/fileadmin/dam/rtlws/12/Brown.pdf)
* [Real Time Systems](http://www.slideshare.net/anil_pugalia/real-time-systems)
* [http://www.cs.ru.nl/lab/xenomai/exercises/](http://www.cs.ru.nl/lab/xenomai/exercises/)
* [背景知識 ](https://www.osadl.org/fileadmin/dam/rtlws/12/Brown.pdf)
* [應用案例 ](http://veter-project.blogspot.tw/search/label/xenomai)
* [應用案例II ](https://www.youtube.com/watch?v=cNZPRsrwumQ)
* [real-time Linux 介紹 ](http://class.svuca.edu/~sau/class/CE460/IntroEmbeddedLinuxDesign_Spring2014_Sec_13.ppt)
* [Xenomai 專案維護人的介紹 ](http://elinux.org/images/7/70/Gerum-elce-09.odp)
* [RTOS 定義 ](http://open-robotics.com/report/rtos/)
