版本 fe037fdcc97810eae020d9a5aacb207132a72b00
Changes from fe037fdcc97810eae020d9a5aacb207132a72b00 to 38b1d1380d60d5b037a9c9edf6f60c2ccfe4607f
---
title:期末專題: Team #3
categories: embedded2013
toc: no
...
題目
---
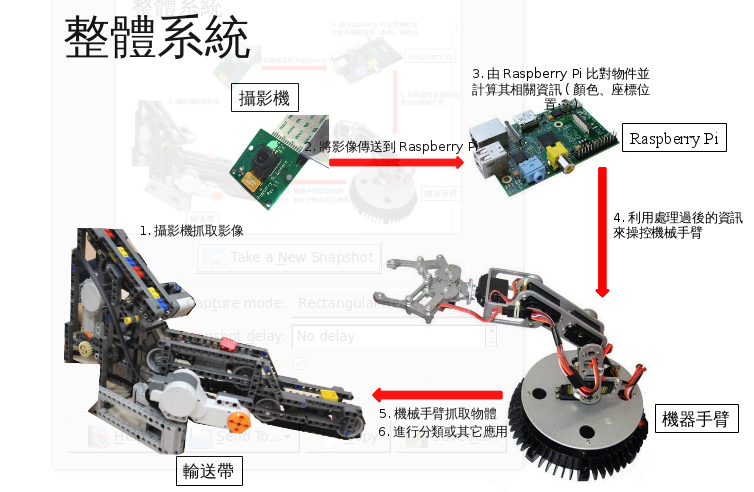
* 影像伺服系統 (Visual Servo System)
簡介
-----
* 在控制領域中,伺服表示位置的控制
* 本專題模擬工廠中的自動化輸送帶,搭配影像偵測我們想夾取的物件,透過控制將物品夾起來

預期目標
-------
* 初期:用攝影機定位輸送帶上的物件,當偵測正確的物品時(利用Template Matching Algorithm),利用機械手臂追蹤。
* 未來:如果可以得知景深,搭配逆向運動學(Inverse Kinematic)可以控制手臂,達成影像伺服的目的。
組員
----
* [趙愷文](/User/kevin)
* [楊曜賓](/User/Andy)
* [簡源鋒](/User/pippen6668)
預算
----
* [六自由度舵機支架含底盤 ](http://goods.ruten.com.tw/item/show?21308188214402) - 3738 NTD
* [32路舵機控制板](http://goods.ruten.com.tw/item/show?21309039146277) + [五個伺服馬達](http://goods.ruten.com.tw/item/show?21211166626666) (舵機)- 2426 NTD
程式碼
-------
* [Robot Arm Controller ](https://github.com/kvzhao/FreeRTOS-STM32F4/tree/RobotARM) : 利用STM32F4實踐
* [Machine Vision System ](https://github.com/kvzhao/Pi-TempMatch) : 利用Raspiberry Pi + Camera
開發日誌
--------
* [Blogger ](http://kvzhao.blogspot.tw/2013/12/visual-servo-project.html)
