期末專題: Team #3
題目
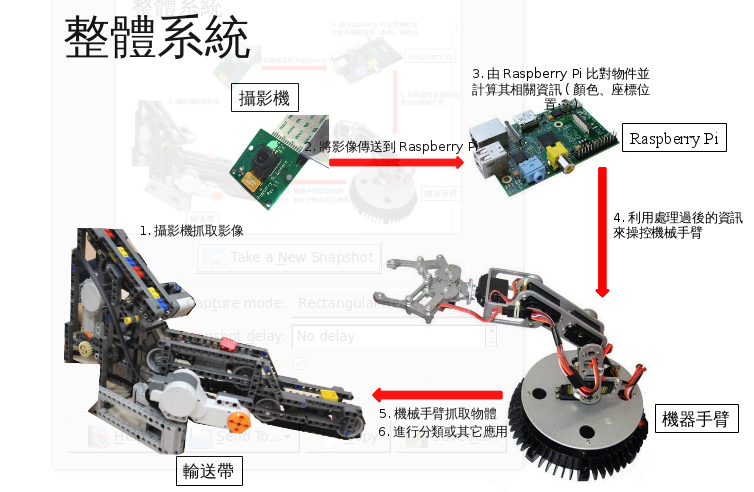
- 影像伺服系統 (Visual Servo System)
簡介
- 在控制領域中,伺服表示位置的控制
- 本專題模擬工廠中的自動化輸送帶,搭配影像偵測我們想夾取的物件,透過控制將物品夾起來
預期目標
- 初期:用攝影機定位輸送帶上的物件,當偵測正確的物品時(利用Template Matching Algorithm),利用機械手臂追蹤。
- 未來:如果可以得知景深,搭配逆向運動學(Inverse Kinematic)可以控制手臂,達成影像伺服的目的。
組員
預算
- 六自由度舵機支架含底盤 - 3738 NTD
- 32路舵機控制板 + 五個伺服馬達 (舵機)- 2426 NTD
程式碼
- Robot Arm Controller : 利用STM32F4實踐
- Machine Vision System : 利用Raspiberry Pi + Camera
