Lab40: Scheduling (2015q1 Week #4)
預期目標
Grasp
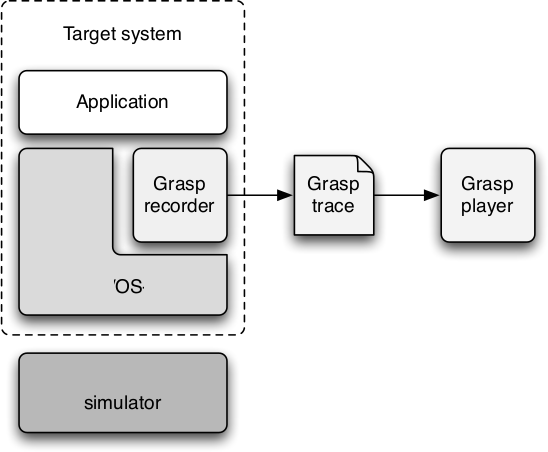
- Grasp
是個能夠追蹤、視覺化,以及測量即時系統中執行時期行為的工具,很容易擴充。
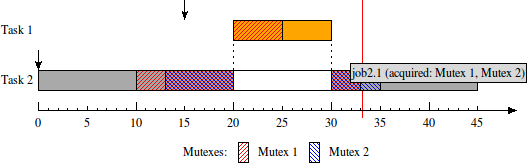
- 使用案例: mutex 視覺化輸出
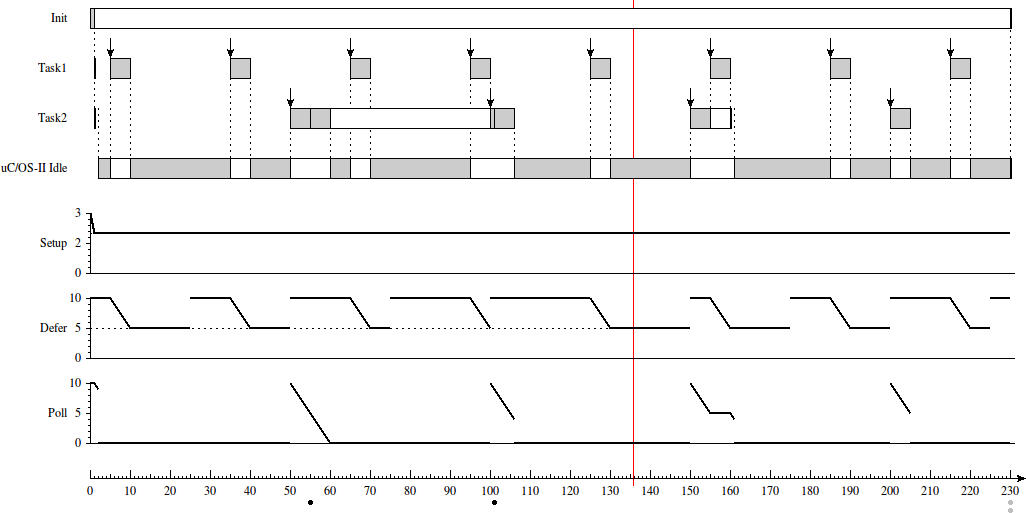
- 使用案例: RTOS scheduling 視覺化輸出
Grasp 安裝
- 抓取預先編譯的程式碼 (x86/linux): 假設和 Lab-39 的工作目錄一樣是
workspace
.. code-block:: prettyprint
sudo apt-get install zip
wget http://www.win.tue.nl/san/grasp/grasp_linux.zip
unzip grasp_linux.zip- 如果你的系統是 x86_64,需要額外安裝 i386 版本的
libxft2和libxss1套件才能執行 Grasp,方法如下:
.. code-block:: prettyprint
sudo dpkg --add-architecture i386
sudo apt-get update
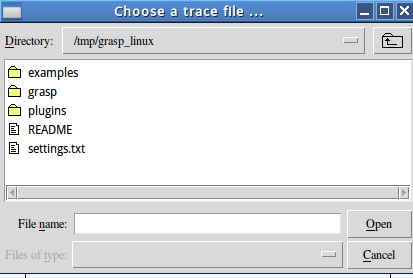
sudo apt-get install libxft2:i386 libxss1:i386- 執行 Grasp、點選
examples目錄並且挑選副檔名為.grasp的檔案,之後觀察視覺化輸出
取得 Visualizer 並測試
- Visualizer 需要 GDB,所以需要事先準備好
.. code-block:: prettyprint
sudo apt-get install gdb-arm-none-eabi- 假設 Lab-39 的
freertos-basic和qemu_stm32都放在workspace目錄cd worksapce
- 取得原始程式碼並且執行
.. code-block:: prettyprint
git clone git://github.com:embedded2015/visualizer.git || git clone https://github.com/embedded2015/visualizer.git
cd visualizer
make qemuauto- 可以見到 idle task 和相關圖例
- 運作原理
- 讀取 SysTick 中 current & reload 的數值,用來計算更精確的時間單位
- 增加追蹤執行狀態的 break point,藉以了解程式目前運作的位置
- 增加程式 context switch 的 Hook
- 將程式在 idle 時的 function 也列入追蹤
檢查清單
- 是否理解 ARM Cortex-M 的 interrupt 處理機制?
- 檔案 main.c
的
USART2_IRQHandler - 檔案 startup_stm32f10x_md.s
的
g_pfnVectors
- 檔案 main.c
的
- 是否清楚 system register 的作用?
- 檔案 main.c
中,位址開頭為 0xe0 的常數或巨集:
NVIC_INTERRUPTx_PRIORITY,get_reload()/get_current()/get_time()(與 SysTick 相關)
- 檔案 main.c
中,位址開頭為 0xe0 的常數或巨集:
參考作業要求
- 改寫
main.c並且引入兩個週期性 Task,使其得以使用 CPU 資源,並且讓 grasp 予以視覺化 - 試著用程式碼自動計算出 context switch 的時間成本
挑戰題
- 說明為何視覺化系統得以運作,以及目前實做的限制與改進方案
- 自動測試 USART 的中斷處理 (對應於
USART2_IRQHandler),並且透過 grasp 視覺化
繳交作業
- 截止日期:
- Mar 28, 2015 (含) 之前
- 更新開發過程到共筆網站: Lab 40 /
作業共筆,需要標注自己的 ID
- 將符合作業提案的程式碼,提交到自行 fork 的 repository: https://github.com/embedded2015/visualizer
- 注意: 要記得 fork visualizer
