版本 098a5ff6b2d45027b29b1917215f2d9cb888530d
Changes from 098a5ff6b2d45027b29b1917215f2d9cb888530d to current
---
title: 期末專題: Team #3
categories: embedded2014
toc: no
...
題目
---
* 四軸飛行手臂
* 四軸飛行器+手臂
預期目標
-------
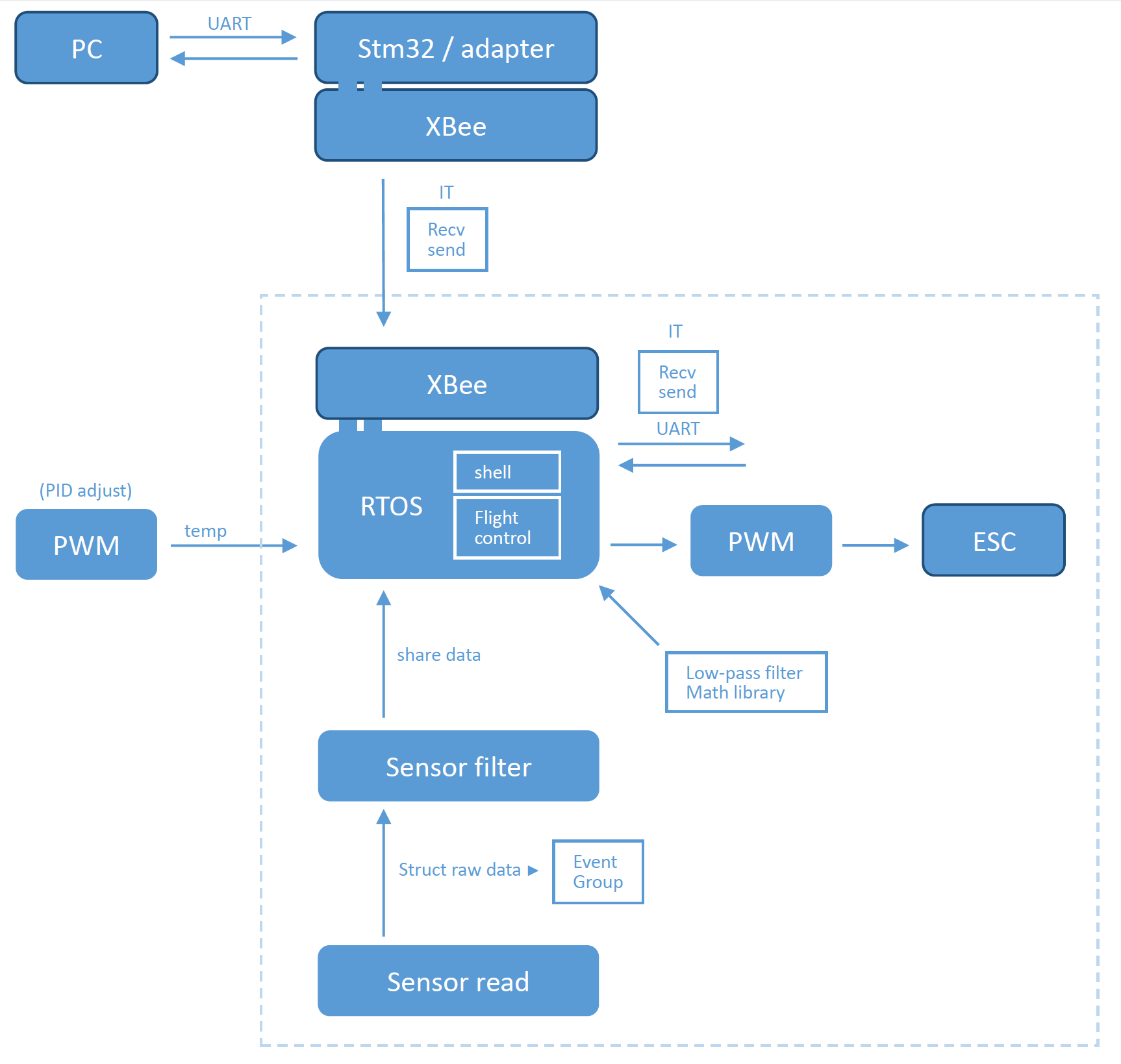
系統架構
組員
---------
* 郭俊儀, e-mail: chuni.kuo@gmail.com
* 孫瑋 , e-mail: saya222777@gmail.com
* 吳哲綱, e-mail: erickitten@gmail.com
* 吳子晨, e-mail: yukkcake@gmail.com
* 王淳莆, e-mail: polarbear2010z@gmail.com
預算
-----------
* 四軸無刷馬達 240 * 4
* 陀螺仪 250 * 1
* 碳尼龍正反槳 70 * 2
* 機架 350 * 1
* 5800mkh 電池 950 * 1
* 40A 電調 260 * 4
* 四軸機身
* 四軸無刷馬達 = NT960
* KV980
* NT 240 * 4 = NT 960
* http://tw.taobao.com/item/15214389733.htm?spm=a1z0d.6639537.1997196601.13.Jzsfiw
* 感測器 GY-801 = NT250
* L3G4200D + ADXL345 + HMC5883L + BMP180
* I2C 介面
* NT250 * 1 = NT250
* http://detail.tmall.com/item.htm?id=23732804276&toSite=main
* 碳尼龍正反槳 = NT210
* 1045
* NT70 * 3 = NT210
* 弄壞追加一組 NT 70
* http://tw.taobao.com/item/41236557987.htm?spm=a1z0d.6639537.1997196601.4.Jzsfiw
* 450mm 機架 = NT350
* NT350 * 1 = NT350
* 翔大模型店購入
* 3S 5800mAh 電池 = NT950
* NT950 * 1 = NT950
* 翔大模型店購入
* 無刷電調 = NT1040
* ZTW中特威 40A
* NT260 * 4 = NT1040
* 翔大模型店購入
* 無線設備
* Xbee*2 = NT1580
* XBee S2
* NT790 * 2 = NT1580
* http://goods.ruten.com.tw/item/show?21406251499733
* Xbee USB = NT735
* 原裝 FT232RL晶片 XBee USB 適配器
* NT245 * 3 = NT735
* http://goods.ruten.com.tw/item/show?21210280601991
* 測試架
* 長條木材 = NT260
* 綠緻松木角料 1.8x240x2.8 cm
* NT65 * 4 = NT260
* 特力屋購入
* 木螺絲 = NT64
* 黑尖尾木螺絲6吋
* 應該要買8吋較適合, 太短!
* NT32 * 2 = NT64
* 特力屋購入
* 尼龍繩 = NT60
* 3mm黃色20台尺
* NT60 * 1 = NT60
* 特力屋購入4
討論和程式
-------
歡迎大家來交流討論!
github:
程式碼和討論
hackpad:
* [github](https://github.com/quadwitharm)
* [hackpad](https://emb_team3.hackpad.com/L2rIFUqGdj1)
每日實驗紀錄:
目前進度:
* 作業系統及函式庫設定(FreeRTOS、STM32Cube(HAL Library))
* 可程式控制馬達轉速(利用PWM)
* 透過I2C設定並讀取陀螺儀資料
* 基本的UART除錯介面
報告
-------
* [QUADROTOR](https://drive.google.com/file/d/0ByoCMilQd_8RT1o1Y0d2VEFlN1E/view?usp=sharing)
* [QUADROTOR](https://docs.google.com/presentation/d/1Uz6UqRSk0FQZ30GcKWFJ1qTecTxxQYybp7Iw-JT4Eck/edit?usp=sharing)
