版本 3f8123b2d9b363749b9933f6ace181ebb1047d2a
RT-Thread
協作者
共筆
- 2015 年春季
目錄
AM335x ARM Cortex-A8 Boot Sequence
圖1 為AM335x開機流程,其包含ROM Code、MLO、U-Boot與OS Image,底下將說明ROM Code、MLO與U-Boot。
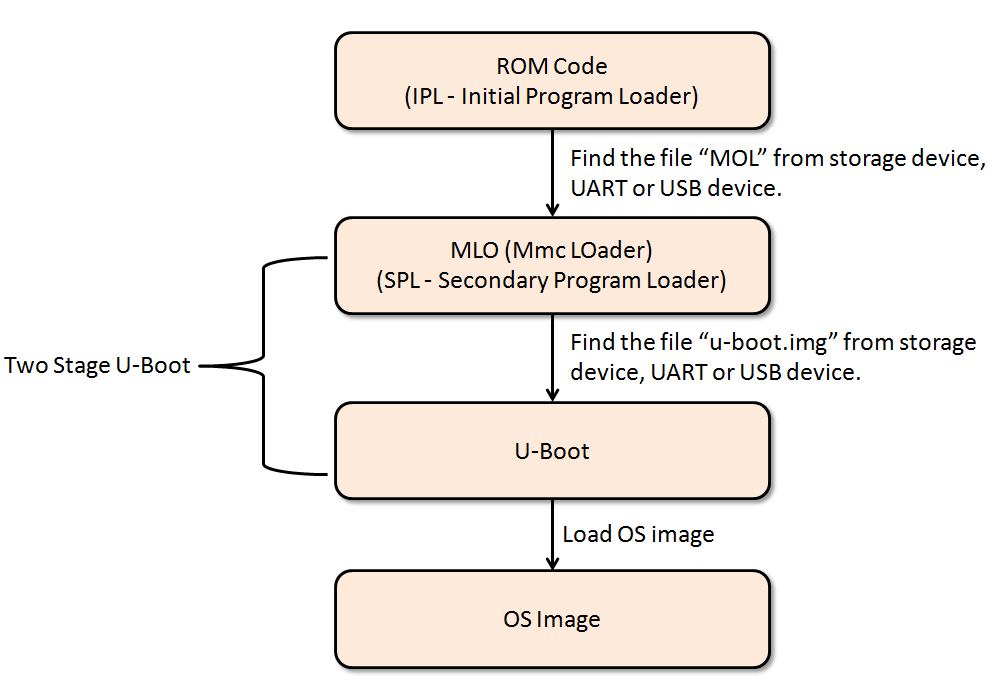 圖1 High-level Overview to AM335x Boot Sequence
圖1 High-level Overview to AM335x Boot Sequence
ROM Code主要有幾項任務: - Stack Setup - Watchdog timer 1 configuration (set to three minutes) - System clock configuration - Search bootable devices (must be the FAT 12/16/32 partition) for a valid booting image (the image name must be MLO) - Load the content of the file “MLO” from a bootable device to internal RAM (the 128KB on-chip memory) - Execute the file “MLO” stored in internal RAM
圖2為ROM Code架構,由”Public ROM Code drivers”可知ROM code支援如下裝置: - MMCSD (MultiMediaCard SD) - NAND - XIP (eXecute In Place) - SPI - USB UART - EMAC (Ethernet Media Access Control)
也就是說,系統一上電,ROM Code會掃描上述裝置,以便找到Bootable device。由於ROM Code只支援FAT檔案系統格式,所以Bootable device一定要是FAT檔案系統 (FAT12/16/32檔案系統都可以)。 注意: 該架構的On-chip boot ROM大小為176 KB。
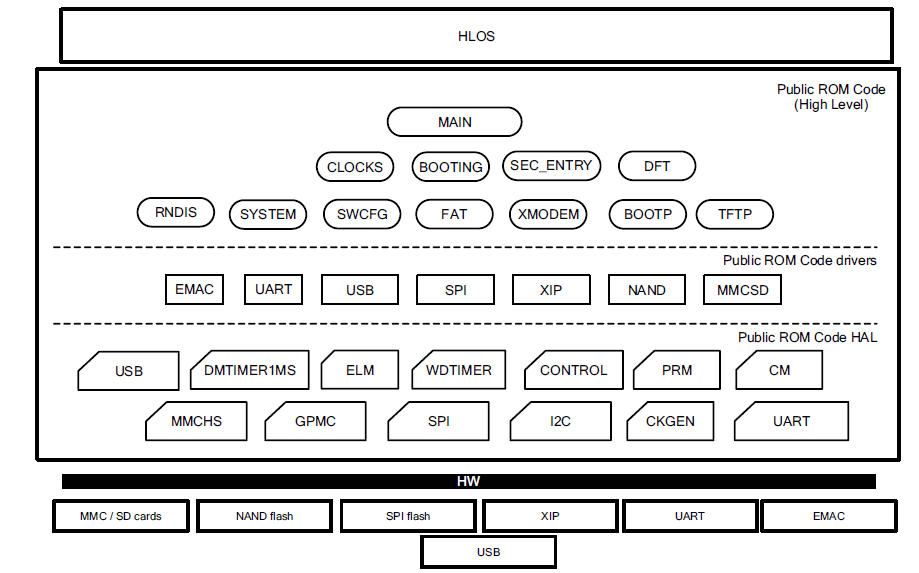 圖2 ROM Code Architecuture (page 4096 in AM335x TRM)
圖2 ROM Code Architecuture (page 4096 in AM335x TRM)
圖3為ROM Memory Map: - ROM Exception Vectors (0x20000-0x2001F): 該區段定義Exception Handler的位址。譬如: 0x20000存放Reset Handler的位址,也就是板子一上電,第一個執行的地方,課程第七周有詳盡的說明,可參考此文件。詳盡的ROM Exception Vectors如表1所示。
表1 ROM Exception Vectors (page 4099 in AM335x TRM)
- Public ROM Code CRC (0x20020): 由0x20000-0x2BFFF計算得出的四個位元組CRC值。
- Dead loops (0x20080-0x200FF): 該區段定義預設的exception handlers,其預設handlers都是執行while(1)迴圈,程式設計者可以定義相同名字的exception handler,如此便能覆蓋 (override)對應之預設exception handlers。可參考mini-arm-os與freertos程式碼,以便了解其設計概念。
- Code (started from 0x20100): ROM程式碼
- ROM Version (0x2BFFC-0x2BFFF): ROM Code Version
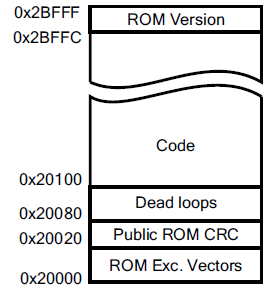 圖3 ROM Memory Map (page 4098 in AM335x TRM)
圖3 ROM Memory Map (page 4098 in AM335x TRM)
VMM (Virtual Machine Module) and vbus
Introduction to VMM
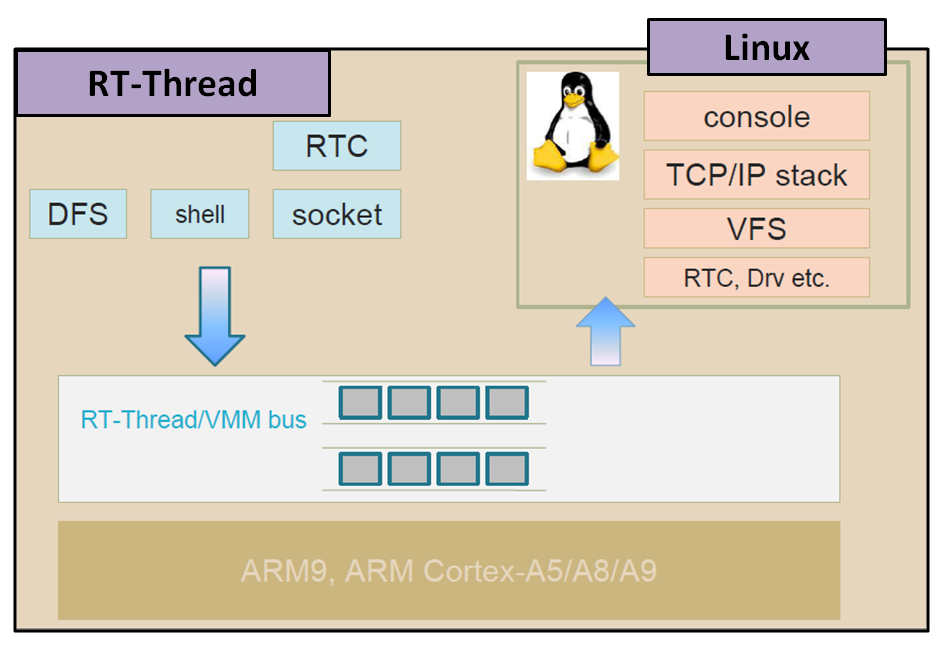
VMM模組可同時運行Linux與RT-Thread,如圖五所示。VMM以半虛擬化方式 (para-virtualization)運行另一個OS。
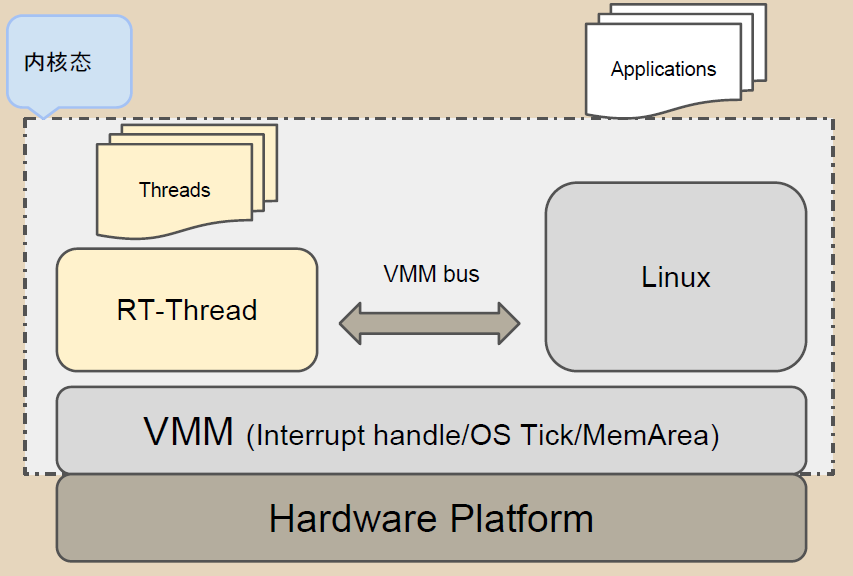 圖五、VMM/vbus Framework
圖五、VMM/vbus Framework
三個元件需要用來實現同時運行RT-Thread與Linux,如下所述: 1. Linux VMM Kernel Patches: RT-Thread開發者發佈兩個Kernel Patches支援多個作業系統同時運行。 2. Linux VMM Kernel Module (rtvmm.ko): 此模組用來載入RT-Thread Binary File。 3. RT-Thread Binary File (rtthread.bin): RT-Thread作業系統二進制檔。
Running VMM on QEMU (target machine: realview-pb-a8)
[編譯與執行]
rt-thread-vmm-builder自動地將Linux VMM Kernel Patches、Linux VMM Kernel Module與RT-Thread Binary File編譯,並產生kernel image (zImage)與root file system。參考底下步驟 (同時可參考rt-thread-vmm-builder 建構環境及相關Toolchain):
git clone https://github.com/AdrianHuang/rt-thread-vmm-builder.git
cd rt-thread-vmm-builder
make
make qemu執行’make qemu’後, 會啟動qemu模擬器,Linux console與RT-Thread console切換鍵如下:
- Linux Console -> Ctrl+Alt+F3
- RT-Thread Console -> Ctrl+Alt+F4
[執行畫面]
圖六、執行’make qemu’並按Ctrl+Alt+F3進入Linux Console
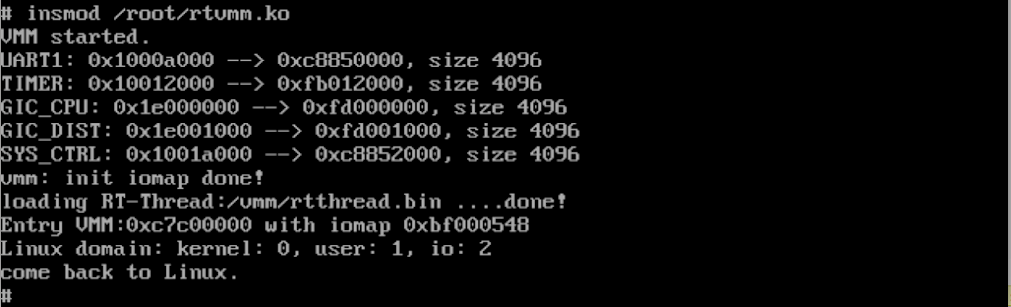
圖七、載入rtvmm.ko模組

圖八、Ctrl+Alt+F4進入RT-Thread Console
Running VMM on BeagleBone Black
參考Building BBB Kernel - Downloading and building the Linux Kernel,嘗試將Linux VMM Kernel Patches加進該kernel (v3.8.13)。然而,遇到底下幾個問題:
編譯錯誤:
執行make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- uImage dtbs命令後,出現底下編譯錯誤:
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- uImage dtbs
...
...
CC arch/arm/vmm/am33xx/virq.o
LD arch/arm/vmm/built-in.o
CC arch/arm/kernel/elf.o
AS arch/arm/kernel/entry-armv.o
arch/arm/kernel/entry-armv.S: Assembler messages:
arch/arm/kernel/entry-armv.S:257: Error: Thumb load/store multiple does not support {reglist}^ -- `ldmia sp,{r0-pc}^`
make[1]: *** [arch/arm/kernel/entry-armv.o] Error 1
make: *** [arch/arm/kernel] Error 2其中{reglist}的”“,代表該指令執行於ARM state,詳情參考ARM官網。底下兩個方法避免此編譯錯誤:
[編譯錯誤解決方法 - 加入ARM()巨集]
#if defined(CONFIG_CPU_V6)
ldr r0, [sp]
strex r1, r2, [sp] @ clear the exclusive monitor
ldmib sp, {r1 - pc}^ @ load r1 - pc, cpsr
#elif defined(CONFIG_CPU_32v6K)
clrex @ clear the exclusive monitor
ARM( ldmia sp, {r0 - pc}^ ) @ load r0 - pc, cpsr 原始程式碼沒加ARM巨集,加入該巨集可以避免編譯錯誤
#else
ldmia sp, {r0 - pc}^ @ load r0 - pc, cpsr
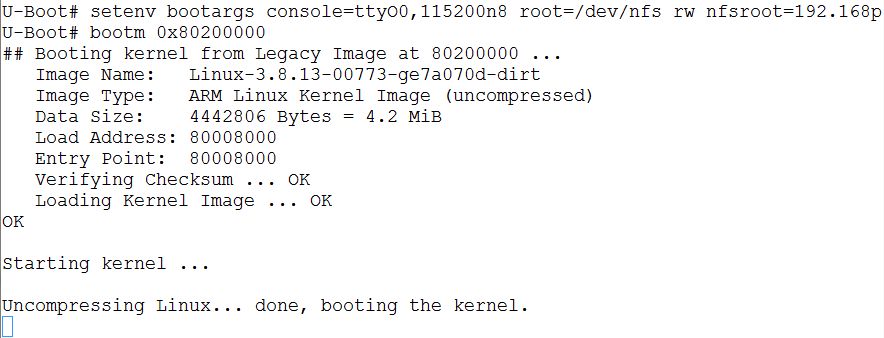
#endif編譯成功後,開進Linux kernel (uImage),發現OS會一直停在Uncompressing Linux… done, booting the kernel.,如下圖所示:
追蹤核心原始碼arch/arm/include/asm/unified.h,發現開啟CONFIG_THUMB2_KERNEL選項,ARM()巨集是空巨集,導致核心卡住。故關閉CONFIG_THUMB2_KERNEL (注意: ARM()巨集不用加到arch/arm/kernel/entry-armv.S)。
[編譯錯誤解決方法 - 關閉CONFIG_THUMB2_KERNEL選項] 關閉CONFIG_THUMB2_KERNEL選項,編譯能成功且可以順利開進核心。然而,載入rtvmm.ko模組會發生錯誤,如下圖所示:

成功開進VMM支援的核心
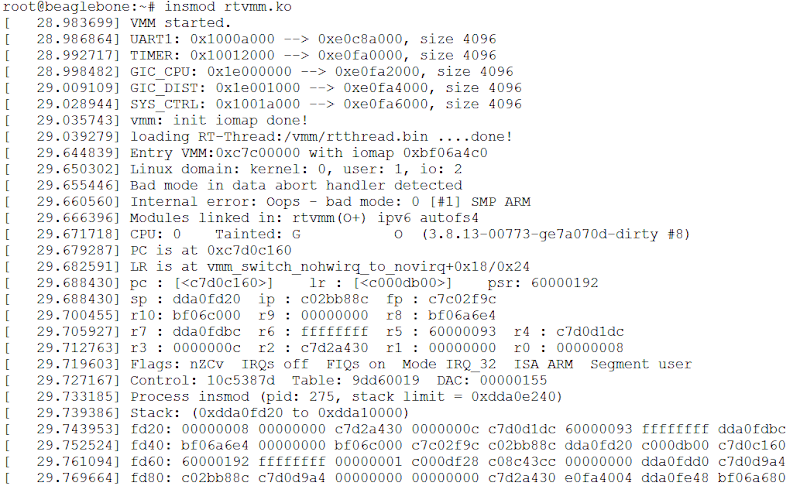
載入rtvmm.ko出錯畫面
追縱RT-thread程式後,發現沒有支援BeagleBone Black的VMM功能 (詳見: libcpu/arm/am335x。目前正在參考Realview Cortex A8 VMM的支援,以便在BeagleBone Black支援VMM。
Introduction to vbus
VMM Bus (vbus)用來讓RT-Thread與Linux相互通訊,且可以讓OS之間的功能共享,如圖九所示。
 圖九、VMM Bus
圖九、VMM Bus
OS之間的功能共享 - Finsh 圖十把finsh
shell指向一個pipe設備,透過該設備把資料寫到ring
buffer,並產生一個中斷用以通知另一個OS。另一個OS接收到該中斷後,便從ring
buffer中,把資料讀取出來。 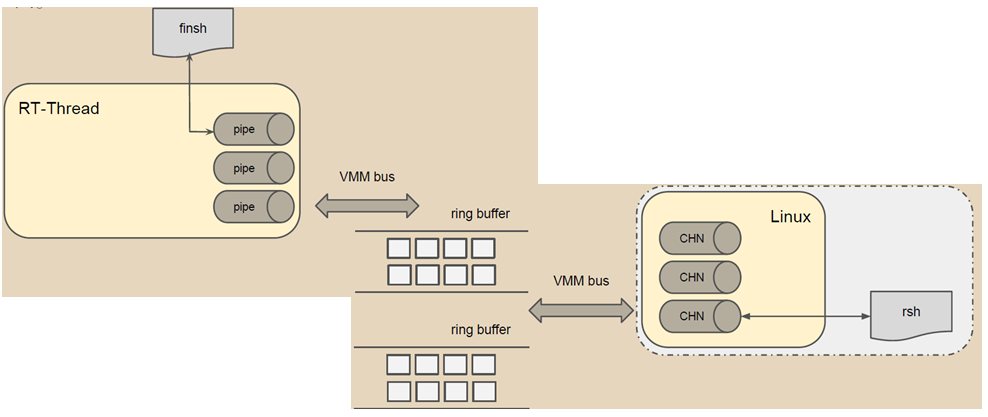 圖十、Finsh/rsh共享
圖十、Finsh/rsh共享
- Two threads:
- Thread: “vbusout” (Priority: _BUS_OUT_THRD_PRIO = 8)
- Thread: “vbusin” (Priority: _BUS_OUT_THRD_PRIO+1)
- [Source Code]
- components/vbus/
- components/drivers/src/pipe.c
- components/drivers/src/ringbuffer.c
- 支援硬體
- [LPC4357] Cortex-M0 & Cortex-M4
- bsp/lpc43xx/M0/applications/vbus_drv.c
- bsp/lpc43xx/M4/applications/vbus_drv.c
- RTMux
- 支援硬體
- [Realview] Cortex-A8
- [Beagle Board Black] AM33x-based Processor (Cortex-A8)
<Under Construction…>
記憶體管理
MMU Configuration in RT-Thread
MRC/MCR Instruction MMU設定跟Coprocessor 15有關,下圖為Coprocessor 15暫存器配置圖 。
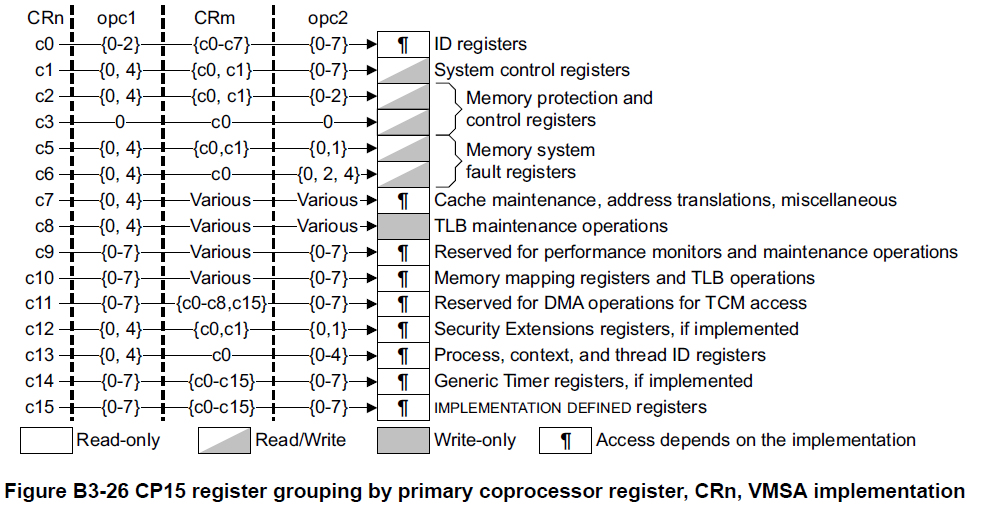 圖四 VMSA: Virtual Memory System Architecture
圖四 VMSA: Virtual Memory System Architecture
MRC: Move to ARM register from coprocessor
- MRC coproc, opcode1, Rd, CRn, CRm{, opcode2}, where Rd is ARM source register
MCR: Move to coprocessor from ARM registers
- MCR coproc, opcode1, Rd, CRn, CRm{, opcode2}, where Rd is ARM source registerMMU Initialization in RT-Thread Disable Data Cache mrc p15, 0, r0,
c1, c0, 0 /* Read System Control Register */ 
RT-Thread 的記憶體管理分成幾個部份:
- 固定大小/數量 memory pool (mempool.c)
rtconfig.h 設定及程式介面
固定區塊 memory pool:
- 啟用 RT_USING_MEMPOOL,記憶體需要事先手動分配 rt_mempool。
動態:
- 啟用 RT_USING_HEAP,可選擇 memheap(RT_USING_MEMHEAP + RT_USING_MEMHEAP_AS_HEAP) 或 slab( RT_USING_SLAB ),包含 rt_malloc, rt_page_alloc 等介面。
另外 memheap 可以獨立使用,不要打開 RT_USING_MEMHEAP_AS_HEAP 即可。
Memory Pool (mempool.c)
RT-Thread 中的 Memory Pool 的記憶體來源可以是原有的全域變數,也可以是動態
分配來的空間(heap/slab)。
Memory pool 提供的是一個固定 block 大小及數量的記憶體空間管理,只能取得
固定的 buffer 大小。裏面目前空閒的 block 以 linked list 型態串接,稱為 free list 。
因為大小是固定大小,因此只要還有記憶體,分配的時間便是一個常數,若沒有空間,
則依據要求記憶體的參數決定要讓該 task suspend 或是直接回傳分配失敗。
API
初始化 (& 動態分配 memory pool 空間):
- rt_mp_init(); // 把現有的記憶體空間建成 rt_mempool
- rt_mp_create() // 使用 heap 做出新的 rt_mempool。
解構 / 解構加釋放:
- rt_mp_detach() // 僅解構
- rt_mp_free() // 從 heap 來的物件需要再做釋放。
使用 memory pool 分配固定大小的記憶體:
- rt_mp_alloc()
- rt_mp_free()
若 block_free_count 不為 0,則將 block_list 指向 list 中下一個並回傳,而 block 中的前 4 個 byte 則當作指標指回 mp_pool,以便在需要歸還時能夠找到對應的 rt_mempool。
第二個參數是等待時間,若沒有可用的記憶體會讓 task 進入 suspend 狀態,直到時間到或是有可用記憶體為止。
- 一個全新的 rt_mempool 示意圖,其中左邊的 block 可以是靜態記憶體(rt_mp_init)、或是從 heap 中拿取(rt_mp_create),

- 假設經過幾次 allocate / free 後,中間兩個 block 目前被程式使用中。
- 因為還有空閒物件,thread_objects 為空。

對 Real-time 能力的影響
allocate / deallocate 的過程中會關閉 interrupt,因此有可能會造成 jitter,另外當記憶體不足時會使得 task 被暫停。
Heap
較簡單的記憶體管理器,使用 free list 串接可用記憶體,並以 first fit 策略尋找,為了減輕碎片化的問題,加上了最小區塊的限制。
Slab Allocator
slab 的其中一個作法是藉由減少物件的 construct 成本以增進效率,而又因為 slab
常用在經常進行 allocate 和 free 的物件,因此也有cache 上的優勢。
介面
假設原本產生新的動態物件的流程如下:
使用完畢後的清理:
Slab Allocator 的作法則是這樣:
至於清理則是:
另外在記憶體不足時可以選擇將 cache 內的物件 destruct 之後釋放
全域 vs. 特定物件
Object caching 的機制可以套用到個別物件的 allocater,也可以針對所有種類的
物件, paper 中提到實作全域配置器的好處:
- 因為記憶體統一管理,可以釋放部份物件空間給予其他物件使用
- 單層的配置器資料結構較多層配置器簡單,較容易除錯
- 避免多種相同功能的程式增加 code size
資料結構
一個 “slab” 是一個 page 大小,在這裡指的是 4k:(在 RT-Thread 中則是 slab_zone)

其中若 buf 處於 free 的狀態,其最後面一個 word 的空間用來放置指標指向 free-
list 的下個物件(稱為bufctl),若 buf 裏面存的是一個 constructed object,則
allocator 會多分配一個 word,避免破壞物件狀態。
若是較大的物件(比方說大於一個page)則不能直接使用上面的資料結構,因為沒辦法從
buffer 算出所屬的 slab 的位址,且空間效率降低(slab 中容易保留很大的空間但又
不足以放下另一個物件),因此在較大的物件要使用不同的資料結構,另外分配記憶體
,由物件本身管理 slab, bufctl,並且加上一個 hash table 來做 buffer-to-bufctl
的轉換。
每個不同的物件擁有一個 cache,包含一些由雙向 linked list 串起來的 slabs,
全部都被使用的 slab 在首,部份使用在中間,全空在最後(最多一個)。
Allocate / Free 操作
Free 的時候因為是 page aligned,因此可以算出 slab 的位址,將要 free 的物件
接回 slab 中的 buf free-list 即可。
由於 slabs free-list 有經過排序,當一個 slab 全空時會放回最後,當要再次進行
allocate 時避免從全空的 slab 中取用記憶體,當沒有新的 page 時有機會可以歸還
回系統,並增加使用中記憶體密集度,使 cache hit rate 提升。
當系統記憶體不足需要回收 page 時,allocator 在釋放時會檢查最近被使用的時間,
避免將常用記憶體歸還造成 thrashing 問題(類似於磁碟不停 swapping 的效應)。
Slab allocator 在 Cache Utilization 上的優勢
這裡提到一個「Buffer Address Distribution」的概念,要調整效能首先要先知道
處理器 cache 的架構及大小等資訊。
am3358(Cortex-A8):
- L1 Cache(I-cache/D-cache, VIPT)
- 4-way set associative
- 16 word line
- 128 bit interface(16 byte)
- 32KB
- 64 Byte line length
Q: What does line length mean?

|image0|
.. raw:: html
硬體上關注的點
.. raw:: html
cache 不同的架構:direct mapping(1-way)、n-way/fully associative
Set associative 意味著同一個位址的資料在 cache 中有幾個位置可以選擇,接近 fully-associate 的 cache 就沒必要進行 coloring。
每個 word line 的大小,決定 coloring 的作法。
.. raw:: html
軟體上關注的點
.. raw:: html
- 物件的記憶體起點(是否對應到 bus 起點)
- 物件內部的 hot data 分佈
- allocate / free 物件的 pattern
.. raw:: html
作法
.. raw:: html
- 在 slab 中並不使用 2 的冪次方作為 buffer 邊界
在於 非 fully-associative 的 cache 架構上佔優勢:
若一個常用物件總是對齊某個 2 的冪次方邊界,因為在 cache 中位置衝突,會
使得 cache 經常被換出而降低效能,避開對齊使得每個 buffer 比較不會搶同一條
cache line。
- Slab Coloring: 在一個 slab 開頭的邊界加上 offset(color)
目的是使不同的 slab 起點的物件不會佔用同樣的 cache line。
RT-Thread 的實作
在 RT-Thread 省去了 slab 的物件建構及解構過程,只使用他的 memory pool 實作。
初始化
首先是 page 的分配,在系統起始時將 heap 範圍中的 page 串入 rt_page_list (透過 rt_page_free)。
Zone size / Zone limit 計算
#define ZALLOC\_ZONE\_LIMIT (16 \* 1024)
#define ZALLOC\_MIN\_ZONE\_SIZE (32 \* 1024)
#define ZALLOC\_MAX\_ZONE\_SIZE (128 \* 1024)
#define RT\_MM\_PAGE\_SIZE 4096 // include/rtdef.hMIN < zone_size < MAX or limsize / 1k
zoom_limit = min( zone_size / 4 , ZONE_LIMIT
struct memusage
- rt_uint32_t type:2
- rt_uint32_t size:30
處理記憶體要求
分成兩種 case:
大於等於 zone_limit:使用 rt_page_alloc 直接取得整塊記憶體。
小於 zone_limit:
request size -> buffer size | buffer index(
zoneindex回傳值)
< 128 -> 補到 8 byte 倍數 | 0 ~ 15 (size/8 - 1)
< 256 -> 補到 16 byte 倍數 | 16 ~ 23 (size/8 - 1 + 8) <- 128 / 16 = 8
< 512 -> 補到 32 byte 倍數 | 24 ~ 31
< 1024 -> 補到 64 byte 倍數 | 32 ~ 39
< 2048 -> 補到 128 byte 倍數 | 40 ~ 47
< 4096 -> 補到 256 byte 倍數 | 48 ~ 55
< 8192 -> 補到 512 byte 倍數 | 56 ~ 63
< 16384 -> 補到 1024 byte 倍數 | 64 ~ 72
總結
RT-Thread 中的實作目前看起來跟 mempool 高度相似,並沒有實作 paper 中的 coloring (也許是參數不足?),以及 hot cache 的 queue,跟 mempool 不同的地方在於預先為各種大小分配好的 zones(slabs),自動 allocate 新的 page 等機制。
在程式碼註解中提到這個 slab allocator 的實作是 per-cpu,不使用 mutex/semaphore,而是透過 critical section(資料需要保護的時間很短)。
另外他提到了不同 cpu 間的 free 要透過 asynchronous IPIs(inter-processors interrupts) 進行,不過程式碼中並沒有看到相關實作,註解中也提到 cpu 間的 Balancing(for what?) 也還沒實作,或是移植時被去除了。
Hook
RT-Thread 在記憶體 alloc / free 結束時,會呼叫使用者指定的 callback,使用:
rt_malloc_sethook(func); rt_free_sethook(func);
參考影片
_ https://www.youtube.com/watch?v=h0VMLXavx30
解說了 slob, slab, slub 三種 “slab” 的歷史與實作。
影片中 “Slab” 代表三種意思:Allocator 類別、Allocator 類別中的一種、一個被管理的 page(或是大型物件)。
裏面提到了 slab 的一些特性:
- 預先消耗的記憶體
- 紀錄 hot memory
- 物件為基礎
- 需要定時掃描
- 比較不適用於多核心環境(每個核心要管理自己的 cache)
部份特性在 RT-Thread 沒有實作。
.. |image
Device File System
RTT的應用層介面實作
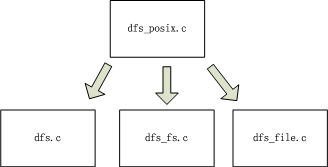
提供API給應用層開發者使用,源碼在._posix.c, 提供的API包括: chdir、close 、closedir、fstat、getcwd、lseek、mkdir、open、opendir、read、readdir、rename、rewinddir、rmdir、seekdir、stat、statfs、telldir、unlink、write
dfs_posix.c會調用dfs.c,dfs_fs,c,dfs_file.c中的一些函數:
DFS框架的組成內容
- filesystem_operation_table:每一個table表示一個FS對應的一套操作函數及相關屬性,不管是什麼FS其操作函數的形式是一致的
/* File system operations struct */
struct dfs_filesystem_operation
{
char *name; //FS的名稱
rt_uint32_t flags; //操作標識
/* mount and unmount file system */
int (*mount) (struct dfs_filesystem *fs, unsigned long rwflag, const void *data); //掛載
int (*unmount) (struct dfs_filesystem *fs); //取消掛載
/* make a file system */
int (*mkfs) (rt_device_t devid); //創建一個FS文件
int (*statfs) (struct dfs_filesystem *fs, struct statfs *buf); //獲得FS當前狀態信息
int (*open) (struct dfs_fd *fd); //打開
int (*close) (struct dfs_fd *fd); //關閉文件
int (*ioctl) (struct dfs_fd *fd, int cmd, void *args); //文件控制
int (*read) (struct dfs_fd *fd, void *buf, rt_size_t count); //讀文件
int (*write) (struct dfs_fd *fd, const void *buf, rt_size_t count); //寫文件写
int (*flush) (struct dfs_fd *fd); //將文件內容保存到設備上
int (*lseek) (struct dfs_fd *fd, rt_off_t offset); //文件內容定位
int (*getdents) (struct dfs_fd *fd, struct dirent *dirp, rt_uint32_t count); //獲取目錄條目
int (*unlink) (struct dfs_filesystem *fs, const char *pathname); //從FS中移出一個目錄
int (*stat) (struct dfs_filesystem *fs, const char *filename, struct stat *buf); //獲得文件狀態信息
int (*rename) (struct dfs_filesystem *fs, const char *oldpath, const char *newpath); //文件重命名
}; - filesystem_table:此table記錄已掛載的FS,每一個table表示掛載的的一个FS
/* Mounted file system */
struct dfs_filesystem
{
rt_device_t dev_id; //此FS對應的ID
char *path; //此FS的掛載點
const struct dfs_filesystem_operation *ops; //此FS對應的操作介面集,指向filesystem_operation_table對應的表项
void *data; //FS的數據
};
fd_table:記錄目前打開的文件集合,每一個table表示一個打開的文件句柄
/* file descriptor */
#define DFS_FD_MAGIC 0xfdfd
struct dfs_fd
{
rt_uint16_t magic; //文件描述魔術
rt_uint16_t type; //文件類型
char *path; //相對於掛載點的路徑
int ref_count; //目前被關聯的次數
struct dfs_filesystem *fs; //對應的FS
rt_uint32_t flags; //標識
rt_size_t size; //文件大小
rt_off_t pos; //當前文件位置
void *data;
}; DFS框架的組成內容
- DFS架構初始化(最頂層)
void dfs_init(void)
{
//清空filesystem_operation_table、filesystem_table、fd_table
rt_memset((void *)filesystem_operation_table, 0, sizeof(filesystem_operation_table));
rt_memset(filesystem_table, 0, sizeof(filesystem_table));
rt_memset(fd_table, 0, sizeof(fd_table));
/* create device filesystem lock */
rt_mutex_init(&fslock, "fslock", RT_IPC_FLAG_FIFO); //FS MUTEX初始化
#ifdef DFS_USING_WORKDIR
/* set current working directory */
rt_memset(working_directory, 0, sizeof(working_directory)); //工作路徑初始化
working_directory[0] = '/';
#endif
} - 具體的FS初始化(中間層),以ELMFAT文件系統爲例:
int elm_init(void)
{
/* register fatfs file system */
dfs_register(&dfs_elm); //註冊elmfat文件系統
return 0;
}
int dfs_register(const struct dfs_filesystem_operation *ops)
{
int index, result;
int free_index;
result = 0;
free_index = DFS_FILESYSTEM_TYPES_MAX;
//首先獲得文件操作權限
dfs_lock();
//檢查該FS是否註冊過
for (index = 0; index < DFS_FILESYSTEM_TYPES_MAX; index++)
{
if (filesystem_operation_table[index] == RT_NULL)
{
/* find out an empty filesystem type entry */
if (free_index == DFS_FILESYSTEM_TYPES_MAX) //記錄第一個空閒位置
free_index = index;
}
else if (strcmp(filesystem_operation_table[index]->name, ops->name) == 0) //若已註冊,则返回錯誤
{
result = -1;
goto err;
}
}
/* filesystem type table full */
if (free_index == DFS_FILESYSTEM_TYPES_MAX) //若FS已滿,則返回錯誤
{
result = -1;
goto err;
}
/* save the filesystem's operations */
filesystem_operation_table[free_index] = ops; //將目前操作集合記錄到空閒位置
err:
dfs_unlock(); //釋放FS操作權限
return result;
} - FS對應的具體設備驅動初始化(底層)
應建立起對應的: rt_sd_init/open/clode/read/write/control,開始可以是空函數(返回類型是rt_err_t的可默認返回RT_EOK)
- 掛載FS(將各層具體關聯起來)
/* mount SPI flash as root directory */
if (dfs_mount("flash0", "/", "elm", 0, 0) == 0) //掛載名爲elm的FS,該FS對應的設備名为flash0,掛載點爲/
{
rt_kprintf("flash0 mount to /.\n");
}
else
{
rt_kprintf("flash0 mount to / failed.\n");
} 參考資料
- Beaglebone
- AM335x (3358) TRM, Datasheet
- ARM Cortex-A8
- POSIX
- EMMC
