ARM-Linux
- 協作者
- 共筆
- 硬體及測試平台
- 編譯arm-Linux(Angstrom)給BeagleBone Black
- Lmbench 3.0 測試方法分析
- Context Switch Latency on BeagleBone Black(Linux)
- Context Switch Latency 測試理論
- Context Switch Latency 理論與實際的結合
- Context Switch Latency 實驗過程
- Context Switch Latency 實驗結果 及 分析
- Ftrace
- KernelShark
- Ftrace和Trace-cmd + KernelShark 綜合使用方式
- Linux Timer Interrupt 理論
- Linux Timer Interrupt 實作
- Linux Scheduler 理論
- Linux Scheduler 實作
- Linux kernel scheduling CFS trace event
協作者
共筆
- 2015 年春季: hackpad
硬體及測試平台
- 電腦端:
- Intel i5/i7
- Ubuntu 14.10 64 bit
- Lubuntu 14.10 64 bit
- 測試硬體:
- BeagleBone Black:
- ARM Cortex A8
- AM3358
- BeagleBone Black:
- 測試平台:
- arm-Linux
- Angstrom
- Kernel version:3.8
- arm-Linux
編譯arm-Linux(Angstrom)給BeagleBone Black
- Environment
$ sudo apt-get install zlib1g-dev libsdl1.2-dev build-essential ddd cpio libncurses5-dev u-boot-tools
$ sudo apt-get install lib32gcc1 ( 64-bit required)
$ sudo apt-get install gcc-arm-linux-gnueabi
$ sudo apt-get install lzop $ git clone git://git.denx.de/u-boot.git
$ cd u-boot/
$ git checkout v2015.01 -b tmp下載一個屬於am335x的環境patch檔 $ wget -c https://raw.githubusercontent.com/eewiki/u-boot-patches/master/v2015.01/0001-am335x_evm-uEnv.txt-bootz-n-fixes.patch
編譯
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- am335x_evm_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- -j4- Kernel 抓source檔
$ git clone git://github.com/beagleboard/kernel.git
$ cd kernel
$ git checkout 3.8
$ ./patch.sh ##This step may take 10 minutes or longer編譯 $ cp configs/beaglebone kernel/arch/arm/configs/beaglebone_defconfig
$ wget http://arago-project.org/git/projects/?p=am33x-cm3.git\;a=blob_plain\;f=bin/am335x-pm-firmware.bin\;hb=HEAD -O kernel/firmware/am335x-pm-firmware.bin
$ cd kernel
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- beaglebone_defconfig
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- uImage dtbs
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- uImage-dtb.am335x-boneblack
$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- modules -j4- uEnv.txt
mmcroot=/dev/mmcblk0p2 rw
mmcrootfstype=ext4 rootwait
console=ttyO0,115200n8
kernel_file=zImage
fdtfile=am335x-boneblack.dtb
loadaddr=0x80008000
fdtaddr=0x88000000
initrd_high=0xffffffff
fdt_high=0xffffffff
ipaddr=192.168.0.25
serverip=192.168.0.20
rootpath=/home/andy/beaglebone/nfs
loadfdt=fatload mmc 0:1 ${fdtaddr} ${fdtfile}
loadkernel=fatload mmc 0:1 ${loadaddr} ${kernel_file}
#boot from nfs
#netargs=setenv bootargs console=${console} ${optargs} root=/dev/nfs nfsroot=${serverip}:${rootpath},${nfsopts} rw ip=${ipaddr}:${serverip}::255.255.255.0:
#netboot=echo Booting from network ...;run netargs; bootz ${loadaddr} - ${fdtaddr}
#uenvcmd=run loadkernel;run loadfdt;run netboot;
#boot from sdcard
loadfiles=run loadkernel; run loadfdt
uenvcmd=mmc rescan;run loadkernel;run loadfdt; run fdtboot
fdtboot=run mmc_args; bootz ${loadaddr} - ${fdtaddr}
mmc_args=setenv bootargs console=${console} root=${mmcroot} rootfstype=${mmcrootfstype}- Filesystem 到此網站抓取檔案系統: http://downloads.angstrom-distribution.org/demo/beaglebone/ 選擇 : Angstrom-systemd-image-eglibc-ipk-v2012.12-beaglebone-2013.09.12.rootfs.tar.xz
$ tar –Jxvf Angstrom-systemd-image-eglibc-ipk-v2012.12-beaglebone-2013.09.12.rootfs.tar.xz將此filesystem放入rootfs磁區
將以下檔案放入到boot磁區
- uEnv.txt
- MLO
- u-boot.img
- zImage({kernel}/arch/arm/boot/zImage)
- am335x-boneblack.dtb({kernel}/arch/arm/boot/dts/am335x-boneblack.dtb)
Lmbench 3.0 測試方法分析
簡介
- Lmbench 3 是一套可移植性高的benchmark,由許多小的benchmark
module組成,具有不少測試功能
- Bandwidth benchmarks
- Cached file read
- Memory copy (bcopy)
- Memory read
- Memory write
- Pipe
- TCP
- Latency benchmarks
- Context switching.
- Networking: connection establishment, pipe, TCP, UDP, and RPC hot potato
- File system creates and deletes.
- Process creation.
- Signal handling
- System call overhead
- Memory read latency
- Miscellanious
- Processor clock rate calculation
- Bandwidth benchmarks
- Lmbench 3 是一套可移植性高的benchmark,由許多小的benchmark
module組成,具有不少測試功能
簡易說明lmebnch測量latency方式:
- repetition
- (執行”repetition次”結果的加總,在除以”repetition次”),就當作”這次”測量的結果
- 一次的測試,latency = (執行時間/iterations)
- iterations為mhz benchmark測量,故不是定值,用以確保執行時間夠長,具有代表意義。
- 執行時間不同當然是因為硬體不同所造成,然而影響最多的就是CPU架構,為了量測出準確的執行時間,必須將不確定因素降到最低,且時間與時脈(倒數關係)息息相關。
- GCD法(最大公因數),必須挑選互相有相依性的指令,因為pipeline的關係,導致cycles變少,且必須防止compiler優化,導致指令不按照預期執行:
如果一個CPU時脈為120Mhz,且執行以下兩個指令
- SHR (2 cycles)
- SHR;ADD (3 cycles)
如果執行時間為:
- SHR 11.1ns (2 cycles)
- SHR;ADD 16.6ns (3 cycles) 可以看出average CPI = 1.5 GCD 為 5.55ns,平均一個指令執行1.55.55ns , 其倒數(1/1.55.55)即為120Mhz,與原先假設相同
compiler的優化例子: a+=a; // ADD optimized to a=0 a&=a; // AND optimized away completely a^=a; // XOR optimized to a=0 a+=b; // ADD optimized to a+=b+b+b+…
因此mhz挑選了9組指令:
- p=*p;
- a^=a+a;
- a^=a+a+a;
- a>>=b;
- a>>=a+a;
- a^=a<<b;
- a^=a+b;
- a+=(a+b)&07;
- a++;a^=1;a<<=1;
- repetition
實際上在source code發現,iterations的值是經由一個迴圈去不斷測試值是否大於需求(根據mhz benchmark作者自己說,是150ms)
#define BENCH_INNER(loop_body, enough) { \
static iter_t __iterations = 1; \
int __enough = get_enough(enough); \
iter_t __n; \
double __result = 0.; \
\
while(__result < 0.95 * __enough) { \
start(0); \
for (__n = __iterations; __n > 0; __n--) { \
loop_body; \
} \
__result = stop(0,0); \
if (__result < 0.99 * __enough \
|| __result > 1.2 * __enough) { \
if (__result > 150.) { \
double tmp = __iterations / __result; \
tmp *= 1.1 * __enough; \
__iterations = (iter_t)(tmp + 1); \
} else { \
if (__iterations > (iter_t)1<<27) { \
__result = 0.; \
break; \
} \
__iterations <<= 3; \
} \
} \
} /* while */ \
save_n((uint64)__iterations); settime((uint64)__result); \
}Context Switch Latency on BeagleBone Black(Linux)
- 取得lmbench並編譯給BBB(arm-linux)
- 由於lmbench 3已經很久沒有更新,lmbench-next為基於Linux的優化開源專案,並不保證能夠正常運作於non-Linux system
git clone https://github.com/el8/lmbench-next.git cd lmbench-next make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
Context Switch Latency 測試理論
Abstract Machine Model:

- 方程式(1):
- TA,M: 在上執行的總時間
- Ci,A(數量): 的執行次數
- Pi,M(時間): 在上的執行時間

- 方程式(2):(多了cahce/TLB miss)
- Fi,A (faults):為記憶體階層的第i層的miss次數
- Di,M (delay):每次miss所付出的懲罰
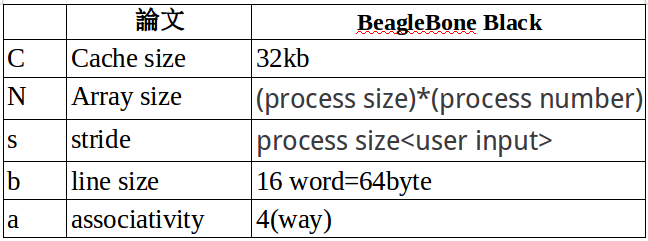
論文實驗方法:
- 測試參數:
- Stride: s
- Array size : one-dimensional array of N k-bytes
- Cache/TLB size: C k-bytes
- Cache Line size:b words
- Cache Associativity: a
- 基本假設:
- 只有L1 cache
- Instruction Cache與Data Cache為獨立的
- Data Cache可用Virtual Address(以後皆稱VA)定址:意思就是記憶體為”連續的區域”
- 子集合的基本單位(by sequence number): 1, s + 1, 2s + 1, …, N - s + 1.
- Cache更新的機制為write-through
- Tno-miss可能包含處理器被強制等待write buffer back up的時間
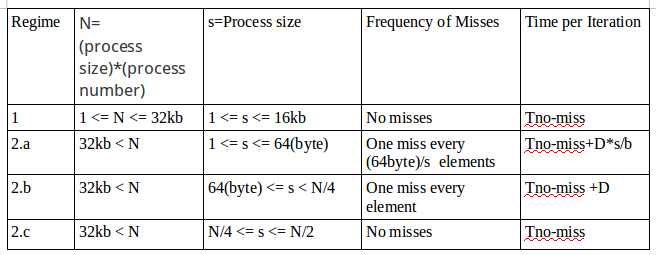
論文實驗分類與討論:
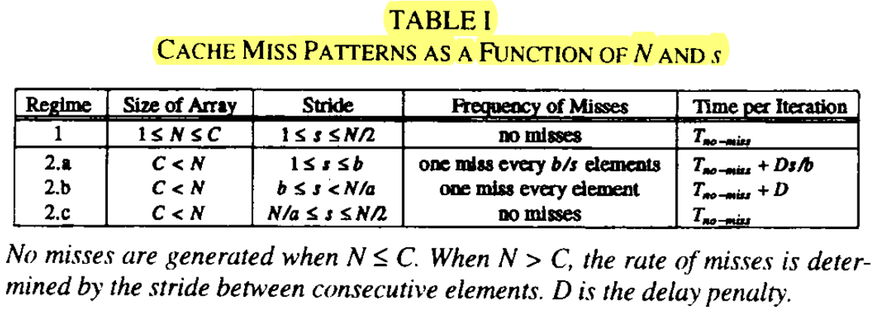
- REGIME 1:
- N <= C
- C為cache的容量
- N為array size
- 只要array被載入,就不再有cache miss出現,也就是永遠只有第一次載入時,會有cache miss
- 每次遞迴的執行時間(Tno-miss)包含讀取一個Array的子集合的基本單位(stride),計算,以及將結果存回Cache
- REGIME 2.a :
- array比cahce size大,所以一次沒有辦法全部讀進cahce
- stride比line size小,所以取一次array不一定會超過cache的大小,會有s/b次miss
- b/s個連續存取到同一個 cache line.
- 第一次載入array,總是Cache miss,REGIME 2 三種討論皆是如此,不再重述。
- 因此執行時間為Tno-miss + D*s/b ;D為delay penalty(代表從主記憶體讀取資料然後恢復執行的時間)
- 現代的cache不以byte為單位了,以cache line為一次抓取資料的單位,故2.a方法已經不再討論,也無法驗證,但是可以驗證line size(如下驗證)
驗證line size造成的miss的影響:
- test_line.c
#include<stdio.h>
#include<sys/time.h>
#include<unistd.h>
#include<stdlib.h>
int arr[64 * 1024 * 80] = { 2 };//just for big enough
int test_line(int step) {
struct timeval start;
struct timeval end;
long unsigned int i = 0;
gettimeofday(&start, NULL);
for (; i < (int)(sizeof(arr)/sizeof(int)); i += step) {
arr[i] *= arr[i];
}
gettimeofday(&end, NULL);
return ( 1000000*(end.tv_sec - start.tv_sec)+ (end.tv_usec - start.tv_usec) ) ;
}
int main(int argc, char *argv[])
{
int test_step = atoi(argv[1]);
printf("%d %d\n", test_step, test_line(test_step));
return 0;
}- shell script
#!/bin/bash
K="1 4 6 8 10 12 14 16 32 64 128 256"
#set -x
for size in $K
do
./test_line $size
done
echo "" 1>&2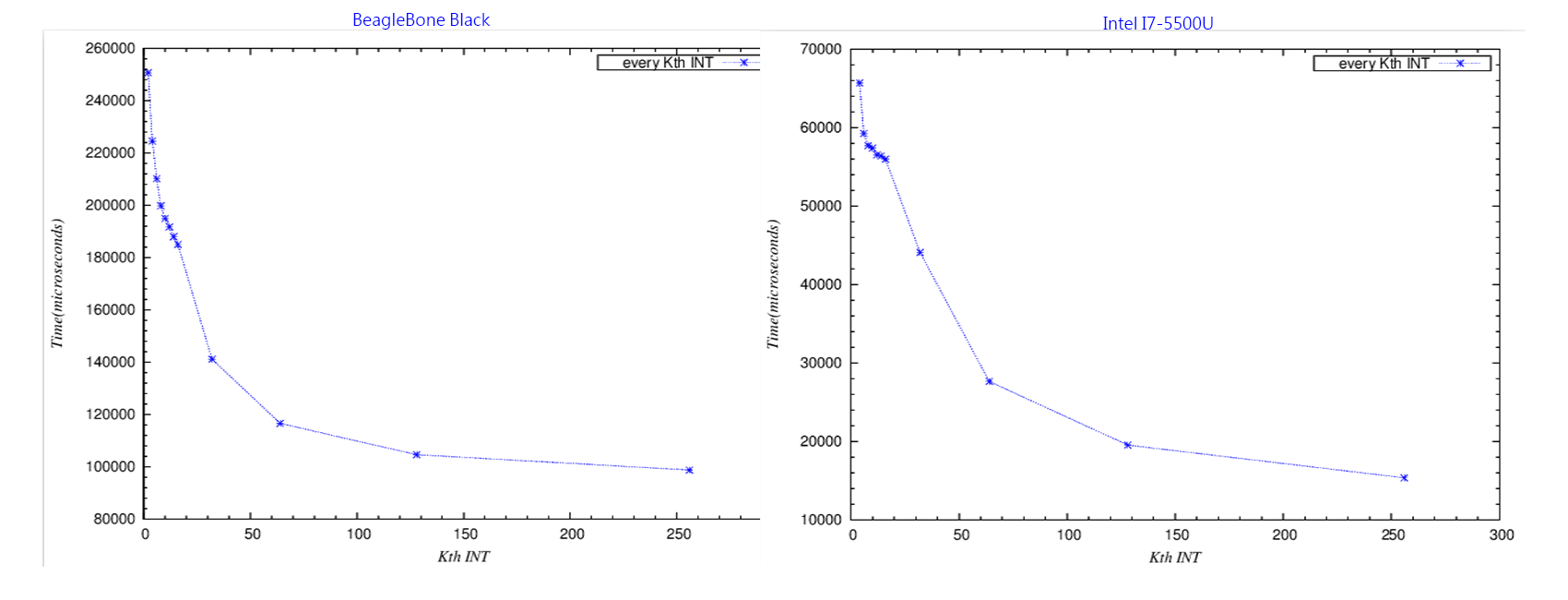 -
會同時放上BBB和i7-5500U的結果是因為,cache line
miss的overhead固然不小,但由於BBB的CPU運算較慢,較不明顯,所以放上較快的i7-5500U做為比較,且兩者的L1
cache line
size均為64bytes,另外,Y軸的時間差異不用太在意,重點是斜率。
-
會同時放上BBB和i7-5500U的結果是因為,cache line
miss的overhead固然不小,但由於BBB的CPU運算較慢,較不明顯,所以放上較快的i7-5500U做為比較,且兩者的L1
cache line
size均為64bytes,另外,Y軸的時間差異不用太在意,重點是斜率。
- 原因:現代的cache一次是抓取一個line
size的資料,在這裡就是64bytes,所以今天array一次就是讀64bytes進來,有以下幾個範例(注意:INT
array一格的大小是4bytes,所以16個就是64bytes):
- k=1,array[0] => array[1] => array[2] => array[3] => … => array[15]都算在同個line裡面,所以只有第一次array[0]會cache line miss,下一次就是array[16],依此類推
- k=4,array[0] => array[4] => array[8] => array[12] 都算在同個line裡面,所以只有第一次array[0]會cache line miss,下一次就是array[16],依此類推
- k=16,array[0] 算在同個line裡面,所以只有第一次array[0]會cache line miss,下一次就是array[16],依此類推
- k=32,array[0] 算在同個line裡面,所以只有第一次array[0]會cache line miss,下一次就是array[32],依此類推
- k=64,array[0] 算在同個line裡面,所以第一次array[0]會cache line miss,下一次就是array[64],依此類推
- k=128,array[0] 算在同個line裡面,所以第一次array[0]會cache line miss,下一次就是array[128],依此類推
消耗的時間為CPU運算時間+cache line miss的時間(沒有miss的讀取cache時間算在CPU運算的份上),可以發現在K<=16時,時間差異只有cache line miss,從圖中可發現,K <=16時,斜率較低,但消耗時間仍然有下降,是因為實質上CPU所運算的對象的確較少,然而到K=32時,CPU雖然運算比先前更少,但是可以看出line(cache) miss的影響比較大,因為同樣都是少了一半CPU運算的對象(k=8與k=16 vs k=16與k=32 vs k=32與k=64),但斜率下降更明顯,就是由於miss的次數少了一半。依此類推,K=64為K=16的miss次數的1/4,但是K=1到K=16的miss次數是一樣的,至於為什麼會這樣,見下圖說明,上面例子也可看出,K越大(K>=16時),下一次cache line miss的位置就越後面,但是array固定大小,所以相對就是cache line miss次數越少。 今天cache一次抓取line size大小的資料,所以64bytes以下的資料都會被抓進來,只是當K!=1且K<16時,會比K=1的情況下,運算較少次,但是miss次數是一樣的! - 說明圖片:(int的大小為4 bytes時) - 32byte為k=8的情況 - 64byte為k=16的情況 - 256byte為k=64的情況 - 碰到紅色代表會miss
- (Jared補充):感謝晶心科技的greentime指出:第一次cache miss,重新fetch到的資料開頭,不一定會如圖中對齊(cahce line開頭 v.s.array存取的位置),但實驗方法該如何修改,仍然在思考中
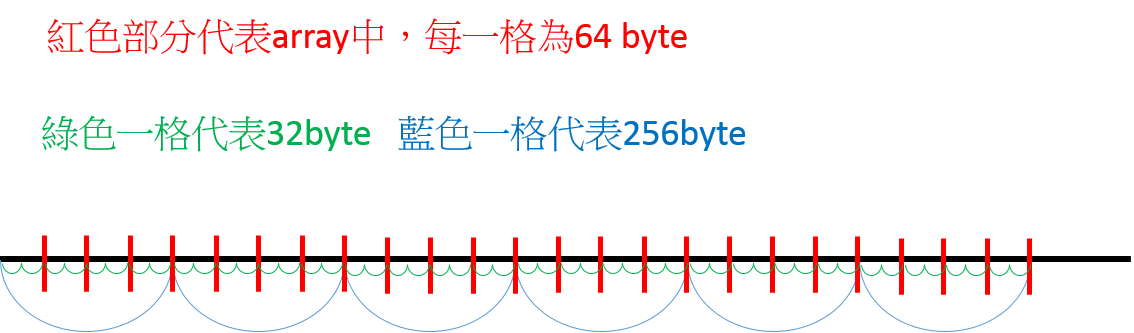
- 今天如果有一個夠大的array,一個line是64byte,那麼如果小於等於64bytes的K,會踩到N次<假設>的cache line miss,但是如果K=128bytes,由於會"跨過"某些cache line miss的"點"(因為沒有要用到那邊的資料),所以時間會大幅降低(因為cache miss的overhead很大,實際上是少了1/2的miss次數),若是K=256bytes,則為少了1/4的miss次數(相較於K<=64bytes)
- 在參考資料1中的example2,它也有說明。REGIME 2.b :
- Array size 比 cache容量大
- stride比line size大(意思是每次都會miss)
- stride比array size小
- 每次遞迴都會有cache miss,也就是說每個Array的子集合的基本單位(stride)對應到一個不同的cache line.
- 每次遞迴的執行時間為Tno-miss + D
REGIME 2.c :
- array size比cache大
- stride介於array size 的1/2~1倍,所以第一次沒有讀進來的array,就再也讀不到了
- 記憶體位置映射到一個單位子集合的次數一定少於associativity,也就是這個情況下(2.c),除了第一次載入Array會有miss之外,就沒有miss了
- 如果array有N elements,只有N/s < a可以被實驗到,且他們個別都可以被放入一個單一的子集合(stride),也就是說N/a <= s.
- 每次遞迴的執行時間為Tno-miss
結論
- TLB的行為可視為與Cache一樣
- Cache/TLB size可藉由測試,當發現Latency time大幅上升時,藉由比較array size(實際上的情況下面會談到)可以知道,因為D(cache miss penality)通常大於Tno-miss
參考資料:
Context Switch Latency 理論與實際的結合
- BBB的AM3358:
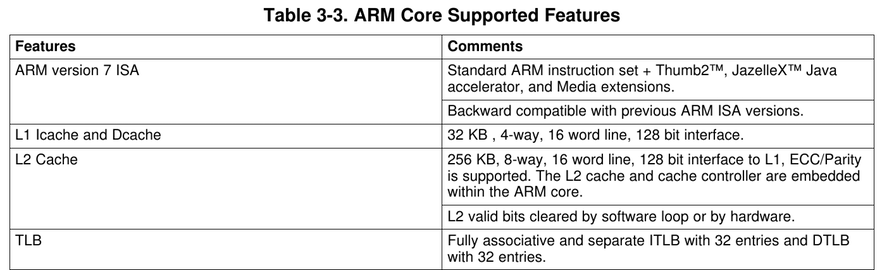
- L1 Data Cache與Instruction Cache互相獨立,均為32KB
- L2 Cache為256KB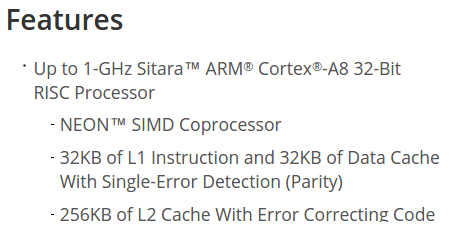
對應”Context Switch Latency 測試理論”
Context Switch Latency 實驗過程
- 因為Linux無法關閉L2
cache,且要將其他程式對cache的影響降到最低,使用sync及drop_caches
- sync && echo 3 > /proc/sys/vm/drop_caches
- 但還是有些許影響,因為清完cache後,Linux還是有其他程式使用cahce,無法避免
- sync && echo 3 > /proc/sys/vm/drop_caches
shell script for 巨觀
#!/bin/sh
WARMUPS=0
REPETITIONS=11
CTX="0 2 4 8 16 24 32"
N="2 4 6 8 10 12 16 24 32 48 64 72 96"
set -x
for size in $CTX
do
#flush cache
sync && echo 3 > /proc/sys/vm/drop_caches
bin/arm/lat_ctx \
-W $WARMUPS -N $REPETITIONS -s $size $N
done
echo "" 1>&2shell script for 微觀
#!/bin/bash
WARMUPS=0
REPETITIONS=11
CTX="2 4 8 16 24 32"
N="2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35"
file_dest="./test_results/"
extension="k.txt"
mkdir -p $file_dest
set -x
for size in $CTX
do
for pnumber in $N
do
RUN="bin/arm/lat_ctx -W $WARMUPS -N $REPETITIONS -s $size $pnumber"
#flush cache
sync && echo 3 > /proc/sys/vm/drop_caches
file=$file_dest$size$extension
if test -s $file
then
$RUN >> $file 2>&1
else
$RUN > $file 2>&1
fi
done
done
echo "" 1>&2Context Switch Latency 實驗結果 及 分析
折線圖可由斜率, 得到rate of time to Size(process number * process size),斜率突然暴增就是cache miss開始發生
長條圖可直接比較Y軸(時間),發現cache miss開始
- L1 cache miss
- 採用Harvard architecture(data/instruction cache分開),分析起來相對於L2 cache容易
- 巨觀
- 理論推算表格(僅取部分,作為代表,可依此類推)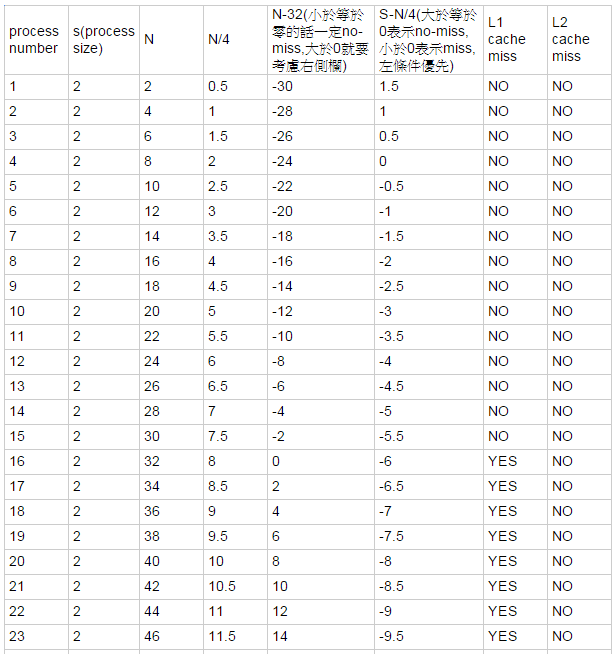
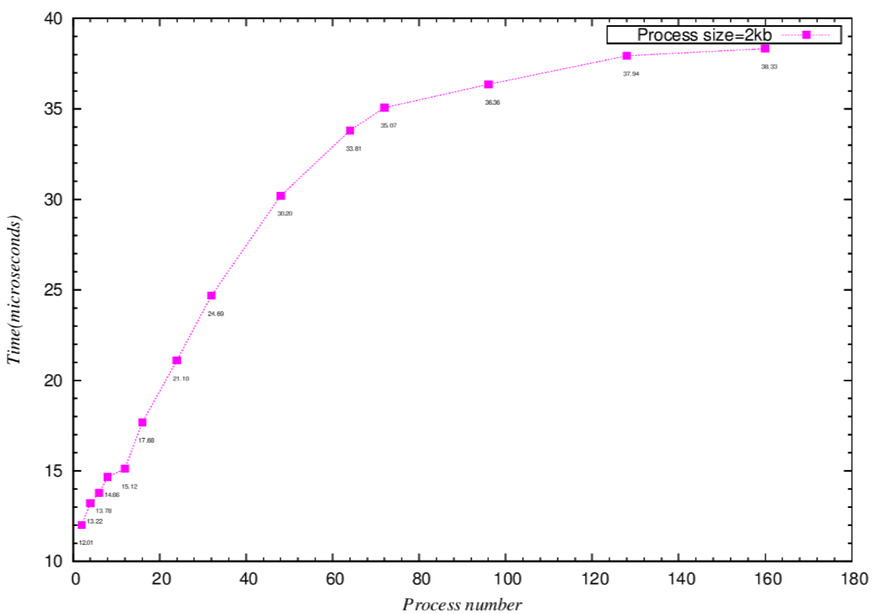
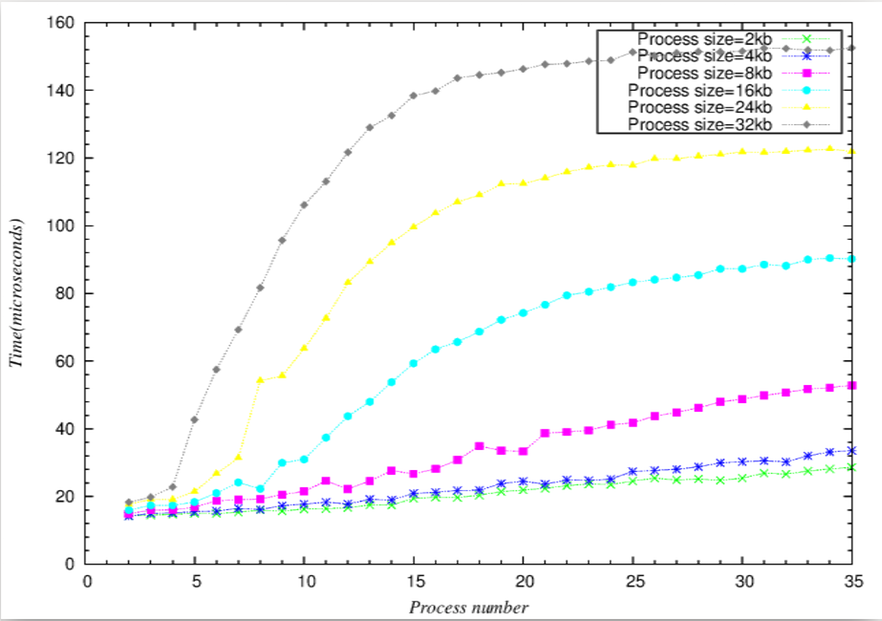
- 微觀折線圖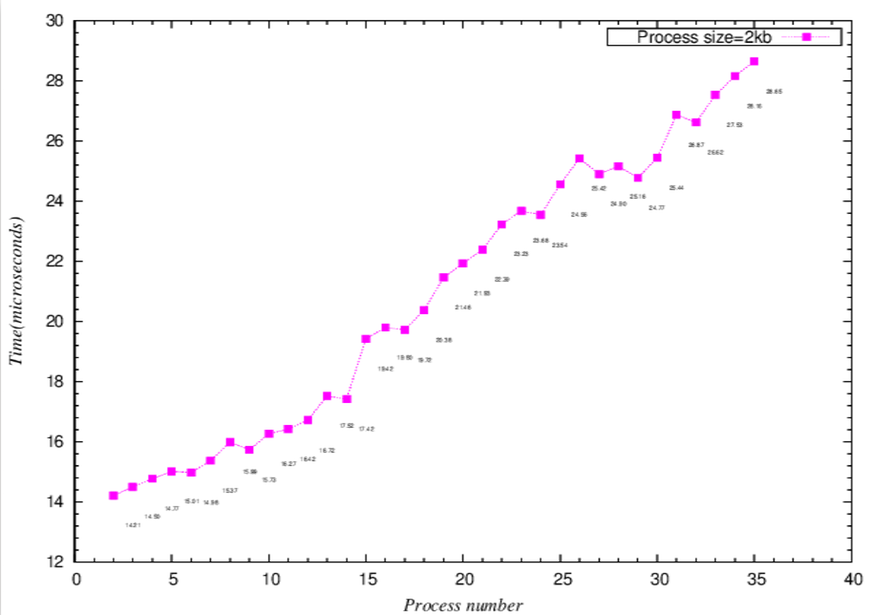
- 微觀長條圖-相較於折線圖,可以更明顯看到,當process number接近16(2k*16=32k,用接近是因為可能有其他程式也使用L1 cache)時,latency大幅上升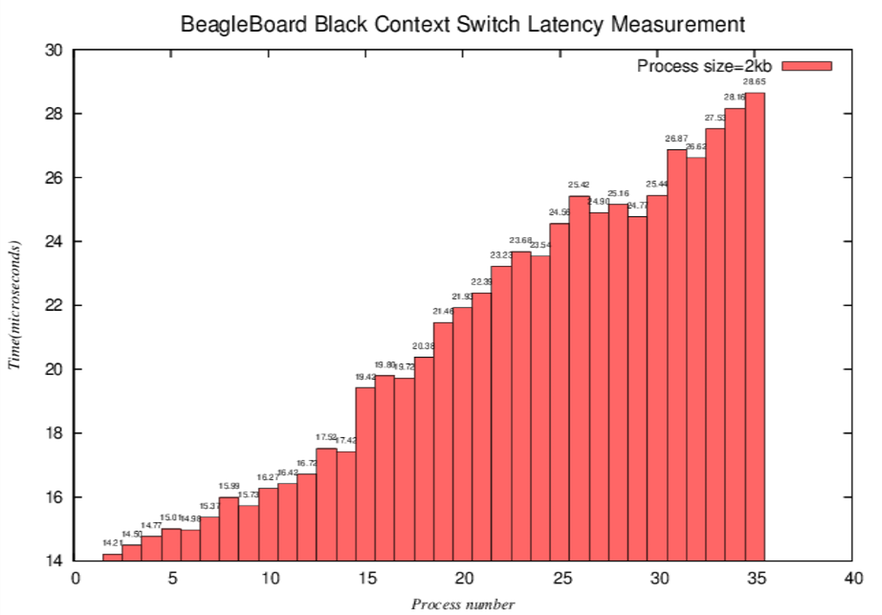
- L2 cache miss
- 由於L2 cahce採用von Neumann architecture(與L1 cache不同!),將data與instruction混合,不易分析,不過我們可以由實驗結果,看出一些端倪。
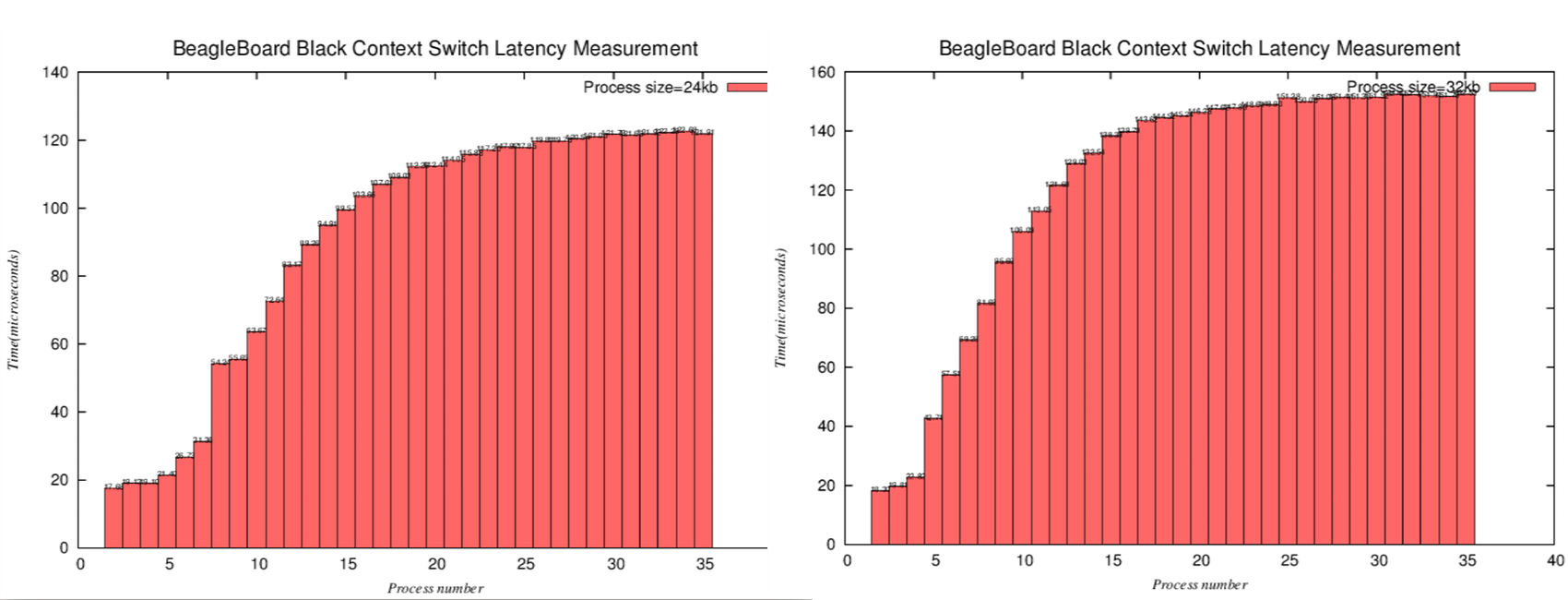
- process size=24k與32k之長條圖比較
- process size=24k與32k之折線圖比較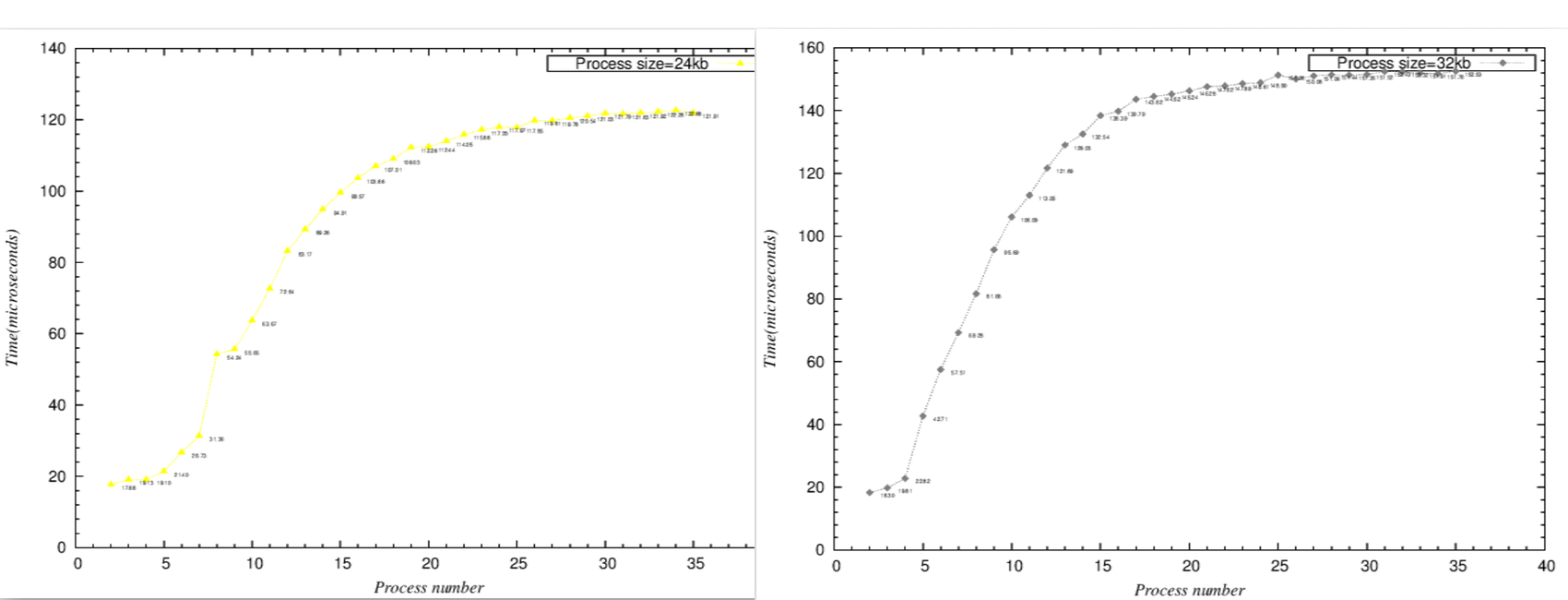
- 由以上2組比較圖,可以看出
- process size=24k時,process number=8,N=24*8=192,latency大幅上升,合理推測這時候L2 cache miss
- process size=32k時,process number=5,N=32*5=160,latency大幅上升,合理推測這時候L2 cache miss
- 這個範圍的變動除了L2 cache除了有其他程式使用外,相較於L1的單純,還要多考慮Instruction的影響。- 巨觀整體趨勢圖
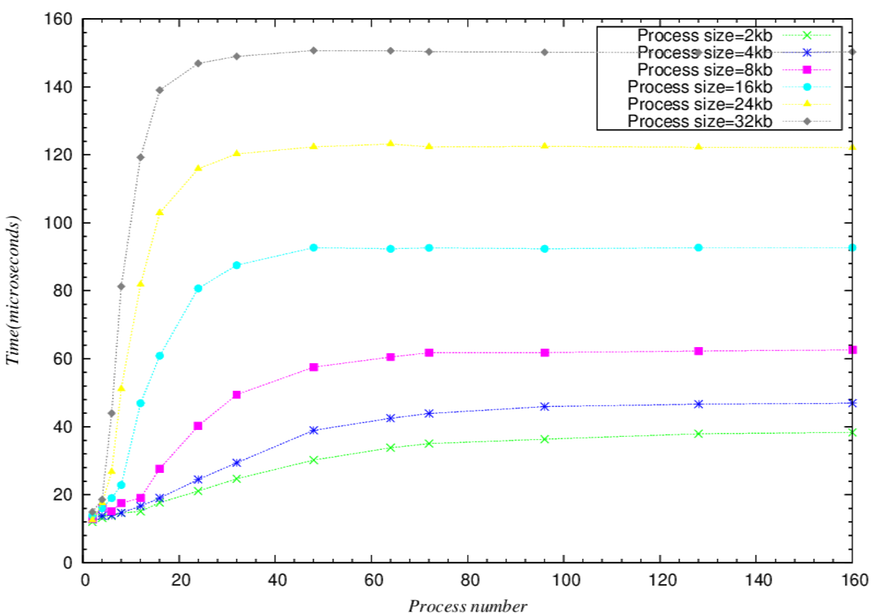
- 微觀整體趨勢圖
Context Switch Latency 結論
- 當(process size)*(process number)+(other program cache) > 32kb(L1
cache size)
- 比較=32kb與下一筆稍大於32kb的數據和下下一筆稍大於32kb的數據可以發現latency time是可以看出latency時間增幅會比較大的趨勢
- L1 cache miss penality影響甚巨。
- 當(process size)*(process number)+(other program cache)+(Instruction
cache affect) > 256kb(L2 cache size)
- 相較於L1 cache的Harvard architecture,採用von Neumann architecture的L2確實比較難以測試出L2 cache的大小,但仍可看出,L2 cache miss的penality不容小覷,比L1 cache miss penality影響更多。
- 可以從整體趨勢發現,當N(process number * process
size)大到某個程度後,latency的時間就趨近於固定的數字
- 可以看出如果process size越大,會越早到達”飽和”(就是比較快到他最終趨近的latency time)
- 注意事項:
- 這個測試必須注意BBB的散熱,吹冷氣+電風扇才不會造成異常結果。
System Call Latency on BeagleBone Black(Linux)
- Lmbench3 lat_unix:
- lat_syscall - This is useful as a lower bound cost on anything that has to interact with the operating system.
- SYNOPSIS
lat_syscall [ -P <parallelism> ] [ -W <warmups> ] [ -N <repetitions> ] getppid | read | write | stat | fstat | open [ file ] - DESCRIPTION - getppid : measures how long it takes to do getppid( ). We chose getppid( ) because in all UNIX variants we are aware of, it requires a round-trip to/from kernel space and the actual work required inside the kernel is small and bounded. - read : measures how long it takes to read one byte from /dev/zero. Note that some operating systems do not support /dev/zero. - write: times how long it takes to write one byte to /dev/null. This is useful as a lower bound cost on anything that has to interact with the operating system. - stat: measures how long it takes to stat( ) a file whose inode is already cached. - fstat: measures how long it takes to fstat( ) an open file whose inode is already cached. - open: measures how long it takes to open( ) and then close( ) a file.- Intel core i5 lmbench3 lat_syscall
Simple syscall: 0.0516 microseconds Simple open/close: 1.0371 microseconds Simple read: 0.1096 microseconds Simple write: 0.1173 microseconds - Beaglebone black lmbench-next
Simple getppid: 0.5671 microseconds
Simple open/close: 11.5381 microseconds
Simple read: 0.9199 microseconds
Simple write: 0.9514 microseconds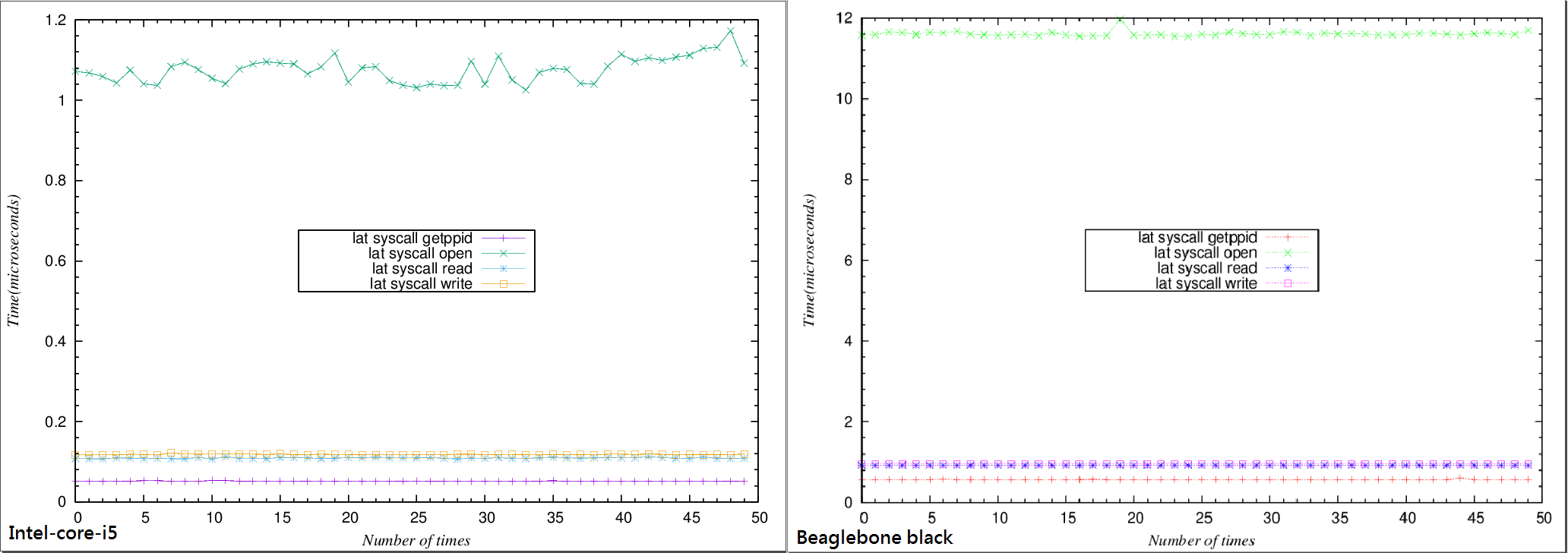
結論
- 可以從上圖看出syscall latency 不論在Intel-core-i5或者Beaglebone black上測出來都是一個穩定的值,藉此還能分別看出 getppid、open/close、read、write這幾個syscall 在其不同硬體上的latency會有不同。
Unix Latency on BeagleBone Black(Linux)
- Lmbench3 lat_unix:
- lat_unix - 測量interprocess communication latency透過UNIX sockets
- “hot potato” benchmark
- benchmark不斷的在2個process間來回傳遞message
- process裡面沒有做任何事情
-測量出的數據( 第一欄為message size,第二欄為latency )
0 3.9333
1 45.2623
2 45.3115
3 45.5246
4 45.4098
5 45.5410
6 45.5702
7 45.5246
8 45.7870
10 45.5000
12 45.5289
16 45.7156
20 45.6694
24 45.7523
32 45.7870
48 46.1574
64 45.9752
96 45.9091
128 46.0965
196 46.2689
256 46.4434
384 46.6555
512 47.1887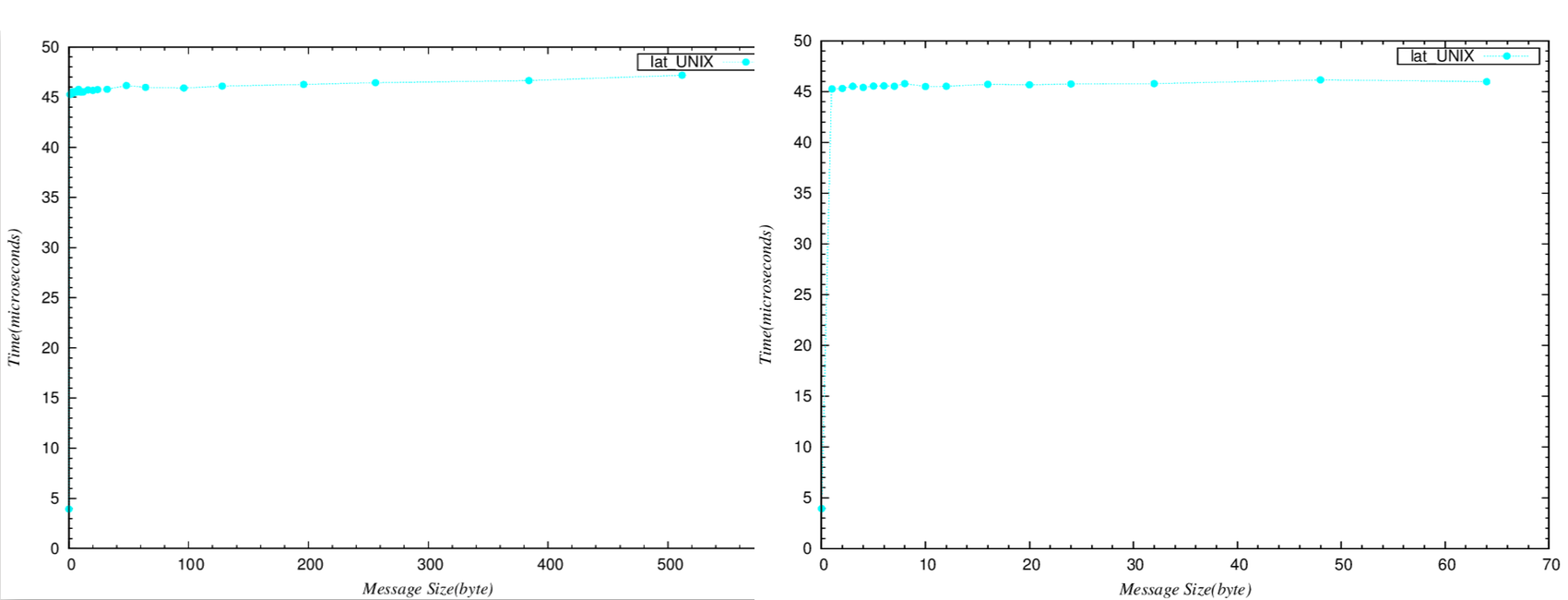
左邊為巨觀,右邊為微觀,可以看出斜率均趨近於0。
結論
- 不論傳遞的message多大(除了0之外),overhead都大約是46 microseconds
Memory Read Latency on BeagleBone Black(Linux)
- 根據不同的記憶體大小與strides測量讀取記憶體的延遲時間
- 藉由man page 得知由memory read latency 所得到的數據可以判斷出測量平台的記憶體階層。
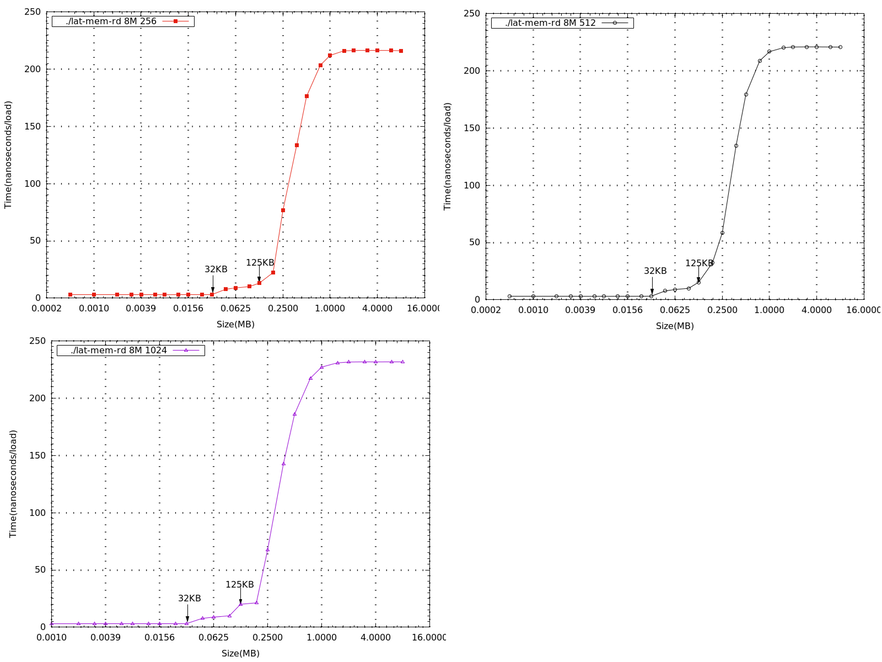
- 下圖比較memory size 1M、2M、4M、8M,以不同stride,在BeagleBone Black 上所測量到的數據(x軸為log2的基底)
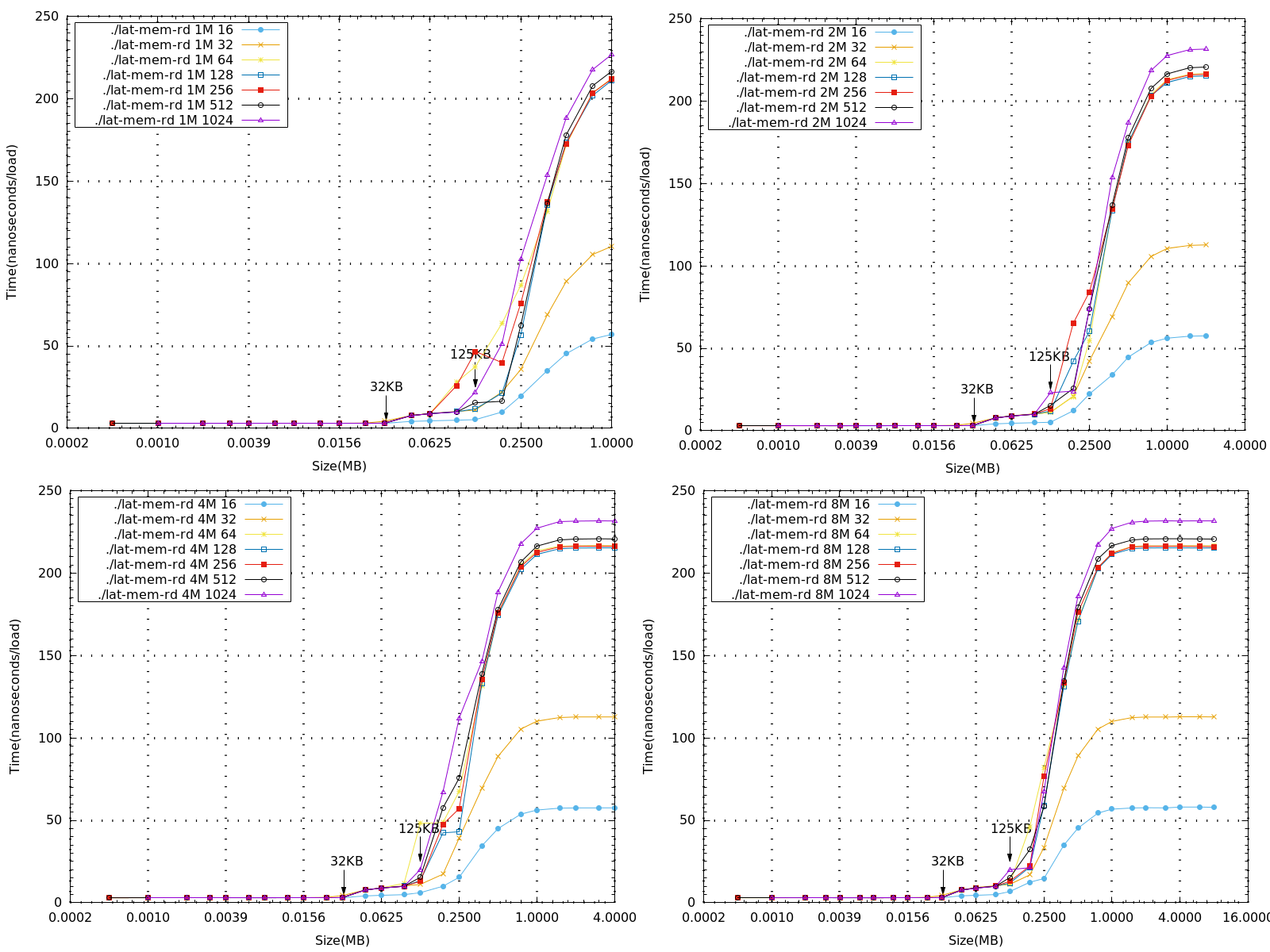
分析
- 從上圖可以看到與理論相符的結果,在L1 cache=32 KB 的地方都會接著一個突起的值。也就是說,當要讀取的值超過L1 cache 的大小時,就必須往下一層的cache去存取資料,因此讀取的時間就會有一定幅度的增加。
- 接著要看L2 cache,採用von Neumann architecture,將data與instruction混合,由上面的圖發現大約都是在size在125KB或187KB 時會接著一個突起的值。而BBB的L2 cache為256KB,因為還要再考慮其他程式與instruction的影響,且再與Context Switch Latency的實驗比較結果是相近的,所以與理論相符。
- 當讀取的大小超過1M後,每筆資料都會趨近於一個定值,而不同的stride收斂的時間有些不同,stride=16的時間大約為stride=32的一半,從原始數據大看大約為57ns與110ns。當stride不超過line size的大小時,收斂的時間應是成線性比例的,這部分可以再做實驗收集數據看結果。
- 再看到若當讀取的stride大小超過line size時,最後的收斂時間大約都相同,差不多在220ns左右。因為一次存取的大小就是一個line size,所以stride大於64的數據收斂時間都是差不多的。
補充
- 下圖為存取1M大小,在stride大小不超過line size的情況,可以發現收斂時間是呈現線性的。
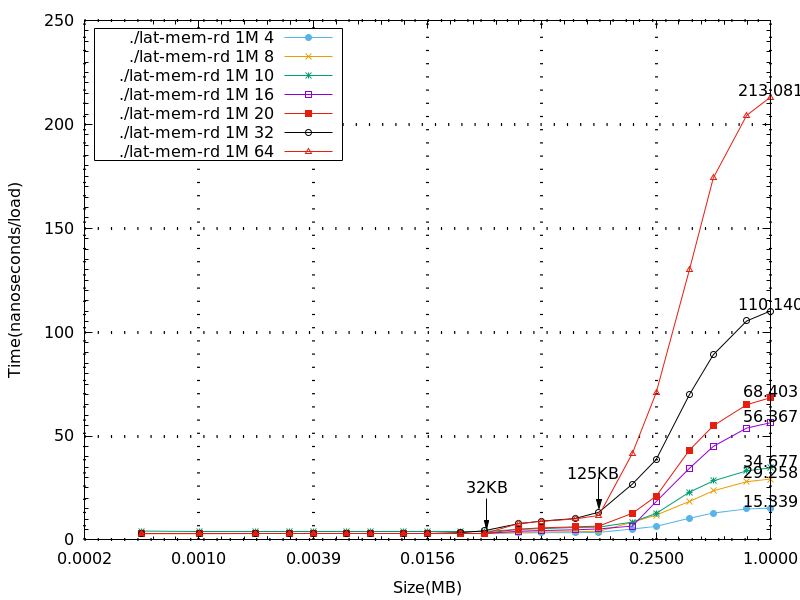 -
過程中發現stride=1、2
時數據測出來都是0,推測是因為memory在讀取的時候一次都是1
個word,所以stride=1、2是沒有意義的。
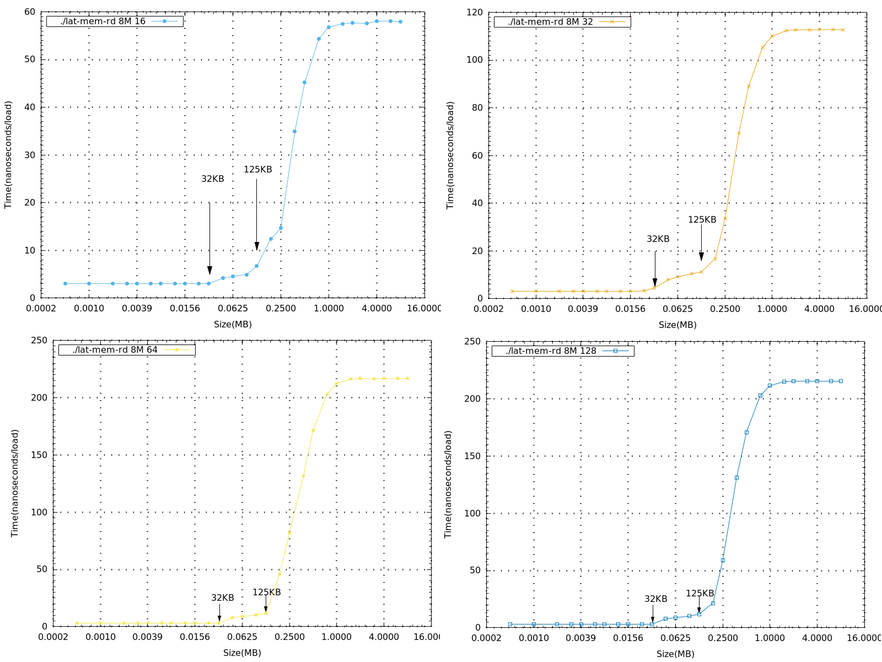
-
過程中發現stride=1、2
時數據測出來都是0,推測是因為memory在讀取的時候一次都是1
個word,所以stride=1、2是沒有意義的。
- 下列一系列圖為memory size=8M,不同stride,在beaglebone black 上所測量到的數據(x軸為log2的基底),單獨畫出來做比較
Linux Kernel 行為分析
Ftrace
- 簡介
- 第一手資料介紹
- 原文: https://www.kernel.org/doc/Documentation/trace/ftrace.txt
- Ftrace 是內建於Linux kernel的追蹤工具,從2.6.27 開始納入kernel主要發展版本。Ftrace被設計用來幫助系統開發者和系統設計者去知道kernel裡面發生甚麼事情。它可用於 debugging 或 分析 latencies and performance 發生在 user-space 之外的問題。
- 雖然ftrace通常被視為 function tracer,但它是其實是一個 framework 包含各式的 tracing 工具集。有 latency tracing以檢查 interrupts disabled 和 enabled 之間發生了甚麼,以及用於 preemption(搶占) 從task被喚醒的時間到實際task scheduled。
- 一個ftrace最常見用法是 event tracing。有幾百個 static event points 通過kernel 我們可以藉由enabled debugfs file system 去看到kernel中某些部份發生了甚麼事情
- 作者介紹
- Ftrace作者為在RedHat服務的 Steven Rostedt,主要目的是為Linux Kernel提供一個系統效能分析的工具,以便用以debug或是改善/優化系統效能,Ftrace為一個以Function Trace為基礎的工具,並包含了包括行程Context-Switch,Wake-Up/Ready到執行的時間成本,中斷關閉的時間,以及是哪些函式呼叫所觸發的,這都有助於在複雜的系統執行下,提供必要資訊以便定位問題
- 第一手資料介紹
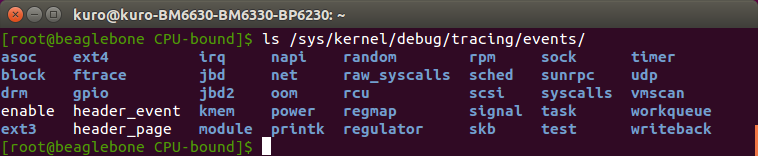
- Ftrace內的檔案 (/sys/kernel/debug/tracing)
/sys/kernel/debug/tracing中,有些檔案是各個tracer共享使用的,有些是特定於某個tracer使用的。在操作這些檔案時,通常使用echo 來修改檔案的值,也可以在程式中通過讀寫相關的函數來操作這些檔案的值。下面只對部分檔案進行描述,詳細可以參考kernel中Documentation/trace 目錄下的檔案以及kernel/trace 下的source以了解其他文件的用途。(註: 請勿使用 vim 編輯器對這些檔案進行編輯)- README
- 提供了一個簡短的使用說明,說明了ftrace 的操作方式。
- 可以通過
cat命令查看該文件以了解大概的操作流程。
- current_tracer
- 用於設定或顯示當前使用的tracer。
- 使用echo 將tracer名字寫入該文件可以切換到不同的tracer。
- 系統啟動後,其預設值為nop ,即不做任何trace操作。在執行完一段trace任務後,可以通過向該檔案寫入nop 來重置tracer。
- available_tracers
- 記錄了當前編譯進kernel的tracer列表,可以通過cat 查看其內容。
- 寫current_tracer 檔案時用到的tracer必須有列在available_tracers列表中。
- trace
- 提供了查看獲取到的trace訊息的port(輸出追蹤結果的地方,靜態)。
- 可以通過cat 查看該檔案以查看trace到的kernel活動記錄,也可以將其內容保存為記錄文件以備後續觀察。
- set_graph_function
- 設置要清晰顯示呼叫關係的函數,顯示的資訊結構類似於C 語言程式碼,這樣在分析kernel運作流程時會更加直觀一些。在使用function_graph tracer時使用。
- 預設為對所有函數都生成呼叫關係序列,可以通過寫該檔案來指定需要特別關注的函數。
- buffer_size_kb
- 用於設置單個CPU 所使用的trace buffer的大小。
- tracer會將trace到的資訊寫入buffer,每個CPU 的trace buffer是一樣大的。
- trace buffer為環形緩衝區的形式,如果trace到的訊息太多,則舊的訊息會被新的trace訊息覆蓋掉。
- 注意,要更改此檔案的值需要先將current_tracer 設置為nop 才可以。
- tracing_on
- 用於控制trace的暫停追蹤或繼續追蹤。
- 有時候在觀察到某些事件時想暫時關閉trace,可以將0 寫入該文件以停止trace,這樣trace buffer中比較新的部分是與所關注的事件相關的;寫入1 可以繼續trace。
- available_filter_functions
- 記錄了當前可以trace的kernel函數。對於不在該檔案中列出的函數,無法trace其活動。
- set_ftrace_filter 和 set_ftrace_notrace
- 在編譯kernel時配置了動態ftrace (選中CONFIG_DYNAMIC_FTRACE 選項)後使用。
- 如果一個函數名同時出現在這兩個文件中,則這個函數的執行狀況不會被trace。
- 注意,要寫入這兩個文件的函數名必須可以在文件available_filter_functions 中看到。預設為可以trace所有kernel函數,檔案 set_ftrace_notrace 的值則為空。
- events(資料夾)
- 可以監控的事件,例如writeback
- trace_options
- 控制輸出結果的資料量,也可修改追蹤器或事件的顯示資料方式
- README
- Ftrace tracer 操作 : 使用
- 使用ftrace 提供的tracer來偵錯或者分析kernel時需要如下操作:
- 切換到目錄 /sys/kernel/debug/tracing/ 下
- 查看available_tracers ,獲取當前kernel支援的追蹤器列表
- 將所選擇的追蹤器的名字寫入current_tracer
- 通過將0 寫入tracing_on 來暫停追蹤訊息的記錄,此時追蹤器還在追蹤kernel的運行,只是不再向文件trace 中寫入追蹤信息
- 通過將0 寫入trace來刪除追蹤訊息的輸出
- 將要追蹤的函數寫入set_ftrace_filter ,將不希望追蹤的函數寫入set_ftrace_notrace。通常直接操作set_ftrace_filter 就可以了
- 激活ftrace 追蹤,即將1 寫入文件tracing_on。
- 如果是對應用程序進行分析的話,啟動應用程序的執行,ftrace 會追蹤應用程序運行期間kernel的運作情況
- 通過將0 寫入文件tracing_on 來暫停追蹤信息的記錄,此時追蹤器還在追蹤kernel的運行,只是不再向文件trace 中寫入追蹤信息
- 查看文件trace 獲取追蹤信息,對kernel的運行進行分析偵錯
- 使用ftrace 提供的tracer來偵錯或者分析kernel時需要如下操作:
- Ftrace on BeagleBone Black (ARM)
- 硬體平台: BeagleBone Black(BBB) Rev.C
- Core Architecture: ARM
- Core Sub-Architecture: Cortex-A8
- Silicon Core Number: AM335x 1GHz ARM® Cortex-A8
- 在BBB上安裝的Linux Kernel version: .config - Linux/arm 3.8.13 Kernel
- Rebuild kernel in BBB
- 由於我們要在BBB上使用Linux,因此在重編Kernel。
- 到kernel資料夾底下,重編指令,
make menuconfig ARCH=arm -j4,即可進入config畫面
- 到kernel資料夾底下,重編指令,
- 之後可以使用以下 tracer
- wakeup_rt
- wakeup
- irqsoff
- function
- 由於我們要在BBB上使用Linux,因此在重編Kernel。
- 硬體平台: BeagleBone Black(BBB) Rev.C
- Trace Event
- Ftrace 最常見用法是 event tracing
- 有幾百個 static event points 通過kernel 我們可以藉由enabled debugfs file system 去看到kernel中某些部份發生了甚麼事情
- debugfs默認是掛載在/sys/kernel/debug下,可以通過debugfs下的tracing/events查看各個event。
- Ftrace 最常見用法是 event tracing
- 以下是跟scheduling相關的event
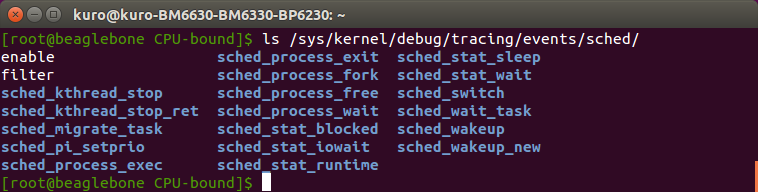
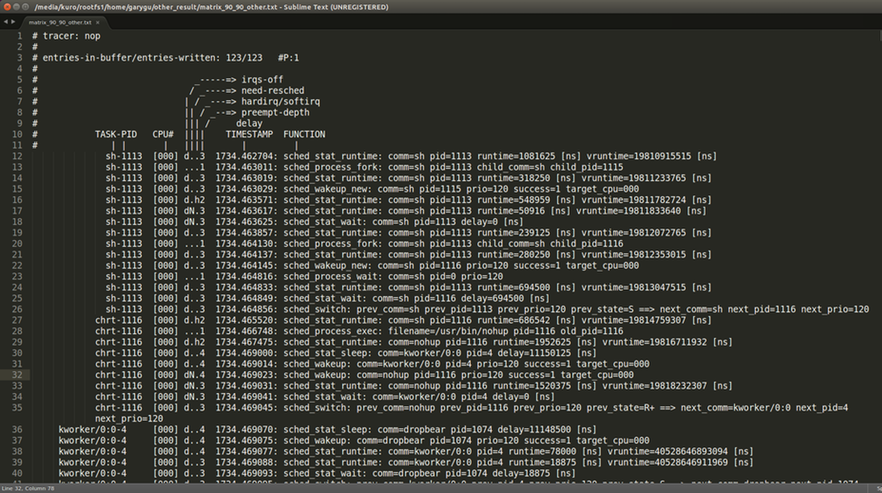
- 操作步驟範例
echo 0 > /sys/kernel/debug/tracing/tracing_on
echo 0 > /sys/kernel/debug/tracing/trace
echo nop > /sys/kernel/debug/tracing/current_tracer
echo 1 > /sys/kernel/debug/tracing/events/sched/enable
echo 0 > /sys/kernel/debug/tracing/events/syscalls/enable
echo 1 > /sys/kernel/debug/tracing/tracing_on
nohup chrt -r 90 ./matrix_mul &
pid1=$!
nohup chrt -r 90 ./matrix_mul &
pid2=$!
wait $pid1 $pid2
echo 0 > /sys/kernel/debug/tracing/tracing_on
cat /sys/kernel/debug/tracing/trace - 結果
KernelShark
trace-cmd - 他是user space front end command line tool for ftrace,有一些distribution將trace-cmd裝成package,就ubuntu 14.10來講,可以透過
apt-get install安裝,裝完就可以使用了$ sudo apt-get install trace-cmdtrace-cmd 基本使用方式 - 簡單的方式就是先紀錄後報告 - 下面的這個指令是,enables the ext4 tracepoints for Ftrace,然後用record指令將ftrace data紀錄到trace.dat的檔案中,然後在透過report指令參數,讀取trace.dat的結果,然後輸出
root@garygu-Aspire-4830TG:~# trace-cmd record -e ext4
root@garygu-Aspire-4830TG:~# trace-cmd report
/sys/kernel/debug/tracing/events/ext4/filter
/sys/kernel/debug/tracing/events/*/ext4/filter
trace.dat.cpu0 trace.dat.cpu1 trace.dat.cpu2 trace.dat.cpu3
Kernel buffer statistics:
Note: "entries" are the entries left in the kernel ring buffer and are not
recorded in the trace data. They should all be zero.
CPU: 0
entries: 0
overrun: 0
commit overrun: 0
bytes: 444
oldest event ts: 12041.827184
now ts: 12041.829362
dropped events: 0
read events: 11
CPU: 1
entries: 0
overrun: 0
commit overrun: 0
bytes: 756
oldest event ts: 12041.826906
now ts: 12041.829397
dropped events: 0
read events: 19
CPU: 2
entries: 0
overrun: 0
commit overrun: 0
bytes: 604
oldest event ts: 12041.827041
now ts: 12041.829426
dropped events: 0
read events: 15
CPU: 3
entries: 0
overrun: 0
commit overrun: 0
bytes: 0
oldest event ts: 11939.099107
now ts: 12041.829453
dropped events: 0
read events: 0
CPU0 data recorded at offset=0x4ee000
4096 bytes in size
CPU1 data recorded at offset=0x4ef000
4096 bytes in size
CPU2 data recorded at offset=0x4f0000
4096 bytes in size
CPU3 data recorded at offset=0x4f1000
0 bytes in size
root@garygu-Aspire-4830TG:~# trace-cmd report
version = 6
CPU 3 is empty
cpus=4
trace-cmd-26790 [001] 12041.826906: ext4_journal_start: dev 8,1 blocks, 35 rsv_blocks, 0 caller __ext4_new_inode+0x595
trace-cmd-26790 [001] 12041.826941: ext4_mark_inode_dirty: dev 8,1 ino 26214438 caller ext4_ext_tree_init+0x3a
trace-cmd-26790 [001] 12041.826949: ext4_mark_inode_dirty: dev 8,1 ino 26214438 caller __ext4_new_inode+0xff1
trace-cmd-26790 [001] 12041.826952: ext4_allocate_inode: dev 8,1 ino 26214438 dir 26214401 mode 0>o<
trace-cmd-26790 [001] 12041.826955: ext4_es_lookup_extent_enter: dev 8,1 ino 26214401 lblk 0
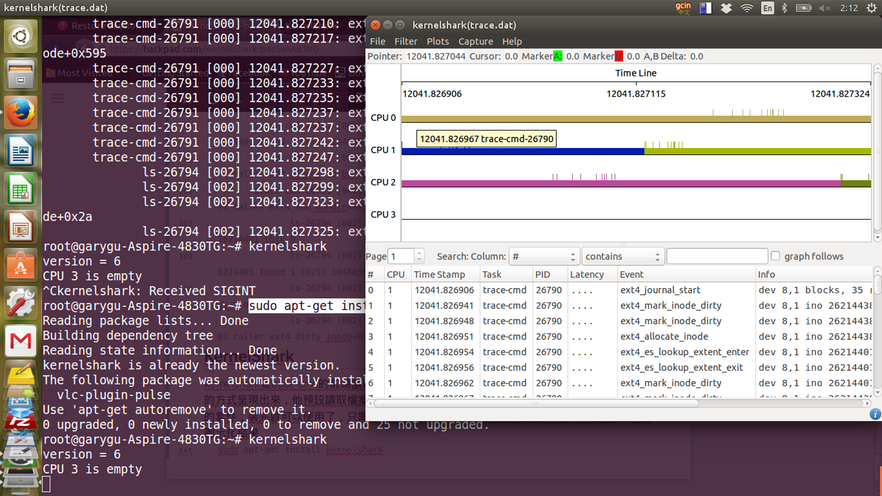
trace-cmd-26790 [001] 12041.826956: ext4_es_lookup_extent_exit: dev 8,1 ino 26214401 found 1 [0/1) 10486- KernelShark
- kernelshark是trace-cmd的前端讀取工具,他專門讀取trace.dat的資料,然後將結果用圖形化的方式呈現出來,他預設讀取檔案就是trace.dat,然後這個kernelshark也是ubuntu可以安裝的套件,裝完就可以使用了,只需要下達
kernelshark就可以自動讀取trace.dat的資料,然後圖示化結果 - 下圖就是將上面trace ext4的結果,圖像畫出來
$ sudo apt-get install kernelshark - kernelshark是trace-cmd的前端讀取工具,他專門讀取trace.dat的資料,然後將結果用圖形化的方式呈現出來,他預設讀取檔案就是trace.dat,然後這個kernelshark也是ubuntu可以安裝的套件,裝完就可以使用了,只需要下達
Ftrace和Trace-cmd + KernelShark 綜合使用方式
- event tracer: 當需要對對特定事件去觀察時, 使用event tracer較能看出事件發生的影響. 而且只trace特定事件, tracer開啟時對於系統效能的影響較小
- 使用方式:
mount -t debugfs debugfs /sys/kernel/debug/
cd /sys/kernel/debug/tracing
cat available_events # 列出目前能使用的event)
echo "irq==21" > events/irq/irq_handler_entry/filter # 設定irq_handler_entry事件的 filter條件
echo "irq==21" > events/irq/irq_handler_exit/filter # 設定irq_handler_exit事件的 filter條件
echo 1 > events/irq/irq_handler_entry/enable # 開啟irq_handler_entry event
echo 1 > events/irq/irq_handler_exit/enable # 開啟irq_handler_entry event- trace-cmd + kernelshark:
利用trace-cmd擷取trace資料並用kernelshark圖形化表示
- 以trace-cmd record持續紀錄trace data
- ./trace-cmd record -e irq_handler_entry -f “irq==21” -e irq_handler_exit -f “irq==21”
- 按ctrl + c 中止紀錄
- 使用kernelshark載入trace.data
- 以trace-cmd record持續紀錄trace data
Linux Kernel Timer Interrupt
Linux Timer Interrupt 理論
Timer在Linux Kernel的例子
- 當我們有一陣子不使用電腦的時候,這時候螢幕會關掉,或是我們收到系統來的警告,要求刪除一些長久沒有使用的檔案,這是怎樣的機制?
- 要能做到上述這些事情,是因為timer允許kernel追蹤我們使用滑鼠和鍵盤的時間,或是記錄距離現在最近一次的使用時間(timestamp),這是timestamp就要透過kernel去紀錄
- 紀錄時間的是透過linux
kernel裡面的變數叫做
jiffies,透過這個變數去紀錄從系統開機後到現在所累積的timer interrupt次數,然後這個次數是根據中斷的發生而增加
Timer interrupt 的用處在於
- 在規定的時間範圍到達時執行指定的function
- 更新日期,時間,和系統開機到目前經過的時間
- 更新系統資源使用率統計
- 檢查目前的所在執行的process是否超過它原本給定的額度,如果是的話,則preempt這個process讓其他程序執行(process switch)
- 檢查軟體時間器(alarm 系統呼叫),跟時間延遲的函式(delay function),其延遲時間是否已經超過
另外硬體也定義了timer interrupt 的週期大概是多少時間,我們可以透過兩個方法找到這個周期定義:
$ sudo make menuconfig如上所示,到這個資料夾底下,下達 $sudo make menuconfig,可以看到圖形化的menuconfig,依照選單選擇Processor type and features —-> Timer frequency (250HZ),就可以找到,因為我們的環境下沒有這個設定檔,所以我就先拿自己的電腦測試
另外還有一種作法可以透過/proc/interrupts這個檔案去trace間隔 1 秒的時間內timer interrupt的次數變化,就可以知道timer interrupt frequency
- 首先可以從/proc/interrupts的檔案裡頭,看到irq的紀錄,可以透過,也可從中看到是哪個CPU在負責哪些中斷請求
cat /proc/interrupts CPU0 34: 38623561 GIC 34 timer 36: 0 GIC 36 rtc-pl031 37: 6126 GIC 37 uart-pl011 41: 170945 GIC 41 mmci-pl18x (cmd) 42: 932753 GIC 42 mmci-pl18x (pio) 44: 8 GIC 44 kmi-pl050 45: 113 GIC 45 kmi-pl050 47: 688 GIC 47 eth0 IPI0: 0 CPU wakeup interrupts IPI1: 0 Timer broadcast interrupts IPI2: 0 Rescheduling interrupts IPI3: 0 Function call interrupts IPI4: 0 Single function call interrupts IPI5: 0 CPU stop interrupts IPI6: 0 IRQ work interrupts IPI7: 0 completion interrupts Err: 0
root@jared14-5480:/# cat /proc/interrupts | grep timer && sleep 1 && cat /proc/interrupts | grep timer
34: 62118555 GIC 34 timer
34: 62118857 GIC 34 timer- 透過這個檢測,可以知道這個linux kernel預設的timer interrupt頻率為300HZ,所以推算出一個timer interrupt所需時間為3.33毫秒
以上這些方法,是參考Adrian’s Blog
Linux Timer Interrupt 實作
Timer Interrupt Frequency
- 但是透過上述這個方法在bbb上測試,結果差距很大,有時候測出來的頻率為21hz,有時是500hz,timer interrupt的頻率相當不固定,這是因為linux kernel希望在idle的時候做少一點事情,可以達到省電的效果,所以設計了這種動態調整timer interrupt frequency的機制
Tickless OS的補充
就是讓kernel的timer interrupt頻率不固定,一般的timer interrupt frequency都會在編譯階段設定好,但是linux kernel希望能做到在idle階段做少一點事 情,也能夠省電,所以有了tickless的機制,也就是這個timer interrupt的頻率是動態調整的。
想要有這個功能就必須在編譯kernel的時候勾選`NO_HZ`,在menuconfig中的 ->General setup ->Timer subsystem -> Tickless System (dynamic Ticks),而我們的beaglebone就是設置了這個Tickless System,才使得每次測出來的timer interrupt頻率不相同- 在架設好的qemu模擬的ARMv7環境,去trace timer interrupt
- 下達
trace-cmd指令,去紀錄從現在開始kernel內部的所有event活動
$ sudo trace-cmd record -e all - 下達
- 這時資料輸出到trace.dat,在將檔案移到我本地端的電腦執行kernelshark,可以看到如下圖,先fliter掉其他task和event只觀察timer event,irq event,然後我先挑一個cpu來觀察CPU0,先行分析
event.png -
可先至 先了解linux kernel的timer interrupt的運作,再搭配圖示 -
從kernelshark下面list中的event info可以看到 - event info -
irq_handler_entry irq=34 name=timer - softirq_raise vec=1 [action=TIMER]
- irq和vec的號碼代表的是什麼? - irq的號碼就是註冊硬體IRQ的編號 -
vec號碼,就是註冊softirq的號碼,這個延遲任務是timer
- Timer Interrupt Flow
- 所以從圖像化出來的list我們可以知道,timer interrupt的順序如下,依照event
- timer_init,初始化timer,不同的function執行,會用不同的位置紀錄
- timer_start,這是開始計時,和這個function他的expiration time時,他還有紀錄要執行這個function要等多少次timer interrupt,如果到達這個expiration time就會執行這個function
- irq_handler_entry,timer interrupt, irq號碼是34
- softirq_raise,因為通常不希望硬體中斷花太常時間,所以會希望由softirq來執行,這個event是指派要處理timer interrupt的action 到softirq_vec中
- irq_handler_exit,硬體中斷離開
- softirq_entry,開始執行延遲任務,開始執行剛剛指派處理timer的action,timer interrupt 加 1
- timer_cancel,停止timer
- timer_expire_entry,表示預計執行指令的時間到了
- timer_expire_exit
- softirq_exit,延遲任務執行結束,然後再下一個timer interrupt
- timer interrupt flow chart
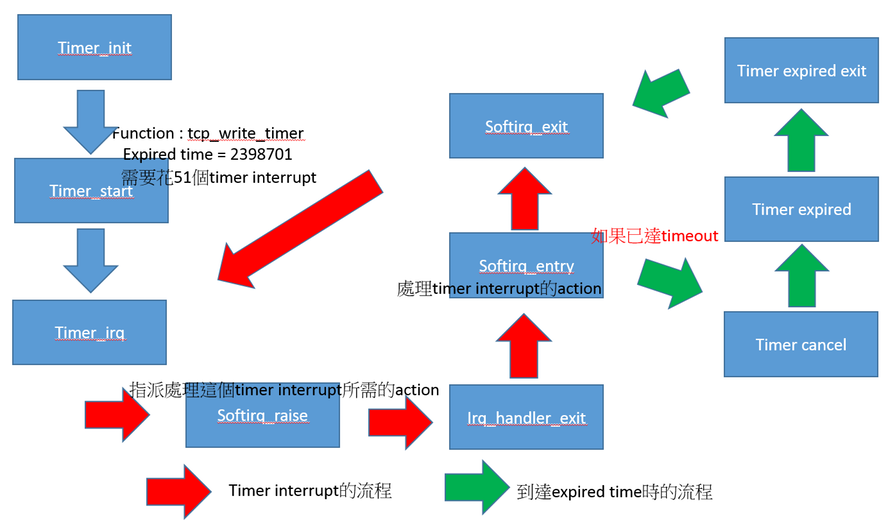
所以我們就可以透過這個timer interrupt的流程,搭配trace出來的資料,知道不同function被觸發或是執行的時間長度了
可以拿一個task所執行的function來看
- task : sshd , function : tcp_write_timer
interrupt task timer.png
從這邊可以看到要執行這個function,必須要等到51個timer
interrupt之後才可以執行,所使用的timer位置是在0xee57a390
Linux Scheduler 行為分析
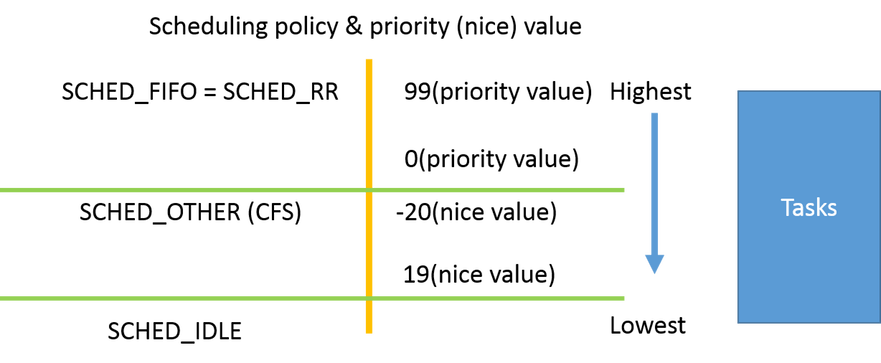
Linux Scheduler 理論
- 藉由CPU在不同行程之間的轉換,作業系統可以讓電腦的產量提高。
- 在單一處理器系統中,同一時間只能有一個Process在執行,其他都必須等待直到CPU有空,才能接著重新排班。
- 排班(scheduling)的工作是在OS之中分配CPU時間給不同任務(task)使用- CPU-I/O 分割週期
- CPU排班的重點在於:行程的執行是由CPU執行的時間及 I/O
等待時間所組成的週期(cycle),行程在這兩個狀態之間交替往返。
- 行程執行由一個CPU分割(CPU burst)開始,接著一個 I/O burst,然後再另一個CPU burst,再來又一個 I/O burst ,最後一個CPU burst結束時,同時會有一個系統 要求中止執行這個 task,如下圖所示。
- CPU排班的重點在於:行程的執行是由CPU執行的時間及 I/O
等待時間所組成的週期(cycle),行程在這兩個狀態之間交替往返。
sequence of cpu and io
bursts.png
- CPU burst 的持續時間可被大量的量測,會大致上類似下圖的頻率曲線所示,這個曲線一般是指數型或超指數型 (hyperexponential)
- 短的CPU burst很多,長的CPU burst則很少。
- I/O bound 的程式之中一般是很多很短的 CPU burst;CPU bound 的程式就會有一些非常長的CPU burst
- 所以根據不同種類的程式選取適當的 CPU排班演算法是非常重要的of cpu_burst
durations.png
- CFS (完全公平排班器,Completely Fair Scheduler)
- 在Linux kernel 2.6版以後引進
- 可參考Linux Kernel 3.0.4中有關CFS的Design文件 (路徑在Documentation/scheduler/sched-design-CFS.txt)
- 作者試著用一句 “CFS basically models an “ideal, precise
multi-tasking CPU” on real hardware.” 來簡要說明CFS 80%設計精神
- 所謂理想的多工處理器,就是當處理器有100%的能力,且系統中有兩個Tasks正在運作,這兩個Tasks可以各自取得處理器50%的執行能力,並被處理器平行執行,也就是說任意時間間隔來看(例如,隨機取10ms間隔),這兩個Tasks都是分配到處理器50%的執行能力.
- 因為在實際的機器上,一次只會執行一個task,所以就必須介紹一下
virtual runtime的概念,他表示你這個task被CPU執行了多久了 - 因為CFS的宗旨是在理想的情況下,希望每個task都能夠被公平的執行,所以照裡來說,每個task的virtual runtime要是相同的,但是事實上不可能是這樣的,一定友人執行的多友人執行的少,為了要balance每個task的執行時間,所以每次在挑task執行時,都會去找virtual runtime最小的task來執行,上述是CFS的理想設計理念,但是也是有跳脫這個基本設計理念的,想是nice levels , multiprocessing , and various algorithms
- 既然要挑最少被執行的task,那要怎麼紀錄每個task的執行時間 ?這邊linux
kernel是使用time-ordered
rbtreedata structure去maintain這些資料,這個資料結構的特性是愈左邊的結點runtime愈少,愈右邊就是執行的比較久的task,所以CFS就會去找leftmost的task起來做
- 大體而言,CFS的執行過程是
- TASK執行一陣子後被scheduler switch out
- 這時就會總結執行的時間到這個task的virtual runtime
- 一旦這個task他總共所執行的時間大於了另一個task的virtual runtime,這時候就是那個task成為rbtree中leftmost task
- 所以這時候就會preempt掉目前正在執行的task,換執行這一個新的leftmost的task
- 傳統的Unix行程排班器會給行程固定的 time-slice,但高優先權的行程比低優先權的行程先執行
- CFS引進新的排班演算法叫做公平排班(fair scheduling)
- 取代傳統固定time-slice,所有的行程被配置一定比例的行程時間
- CFS計算根據一個全部可執行行程的函數計算出一個行程該執行多久
- 一開始,假如有N個可執行的行程,CFS讓每一個行程分配處理器的 1/N時間
- 然後CFS根據每個行程的nice值加權該行程的分配量以調整其分配量
- 使用預設的nice值之行程的加權值是1,優先權不會改變
- 有較小nice值的行程(較高優先權)接收到較高的加權值,而較大nice值的行程(較低優先權)接收到較低的加權值。
Linux Scheduler 實作
- 重編Kernel,讓環境單純化,才會比較符合理論值
- 關掉 SMP
- 關掉SMP的功能,因為BBB是單核心,不需要這個功能,會影響效能
- 高解析度計時器
- 高解析度計時器的解析度為1 ns
- 關掉休眠(省電)機制
- 由於kernel內建休眠機制,這會導致在執行程式時,CPU顯現之效能會隨時間不一致
- 關掉 SMP
根據理論篇,我們想撰寫CPU-bound和IO-bound程式,在不同的排程策略(FIFO, RR)下和給定不同的優先權下,程式會如何執行
- 環境
- BeagleBone Black(BBB) Rev.C
- Linux Kernel version: 3.8.13
- 指令
- 使用如下指令,可以改變排程策略(-f : FIFO, -r : RR),指定優先權(EX:90,45)
- CPU-bound
- 做的是矩陣相乘的動作,複雜度為O(n^3)
- 分別測試
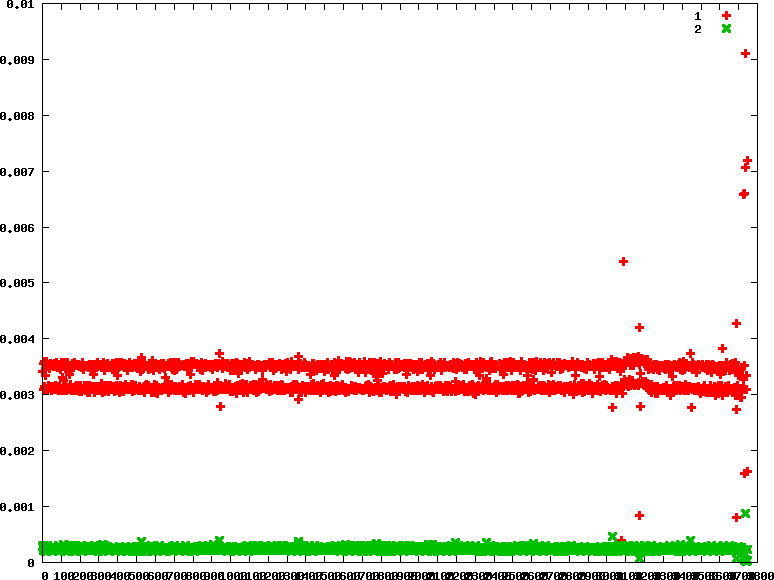
fifo,rrscheduling policy,主要是看不同scheduling policy下和不同優先權的time slice給定方式和行為 - 圖示: 橫軸 : 第幾次switch , 蹤軸 : 這一次switch的time slice
- fifo : 優先權分別為90 90
chrt -f 90 ./../CPU-bound/matrix_mul &
chrt -f 90 ./../CPU-bound/matrix_mul &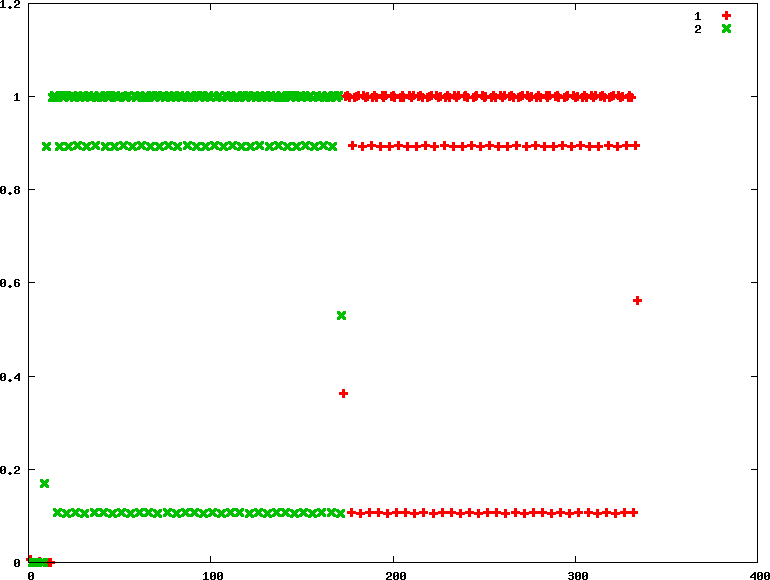
初步觀察,fifo policy的time slice給定差異頗大,而且可見兩個process的執行相當不公平,不過還是可以看到前面的幾次交替還是有給後進來的process執行的機會
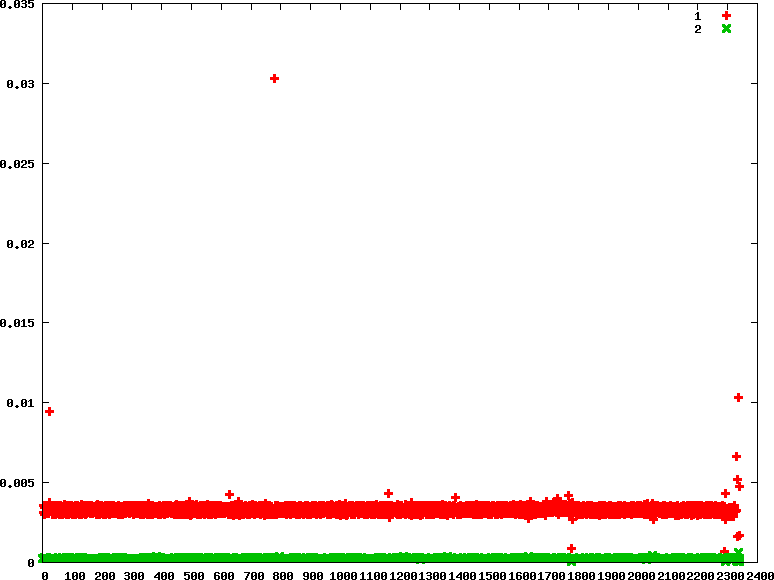
- fifo : 優先權分別為90 45
chrt -f 90 ./../CPU-bound/matrix_mul &
chrt -f 45 ./../CPU-bound/matrix_mul &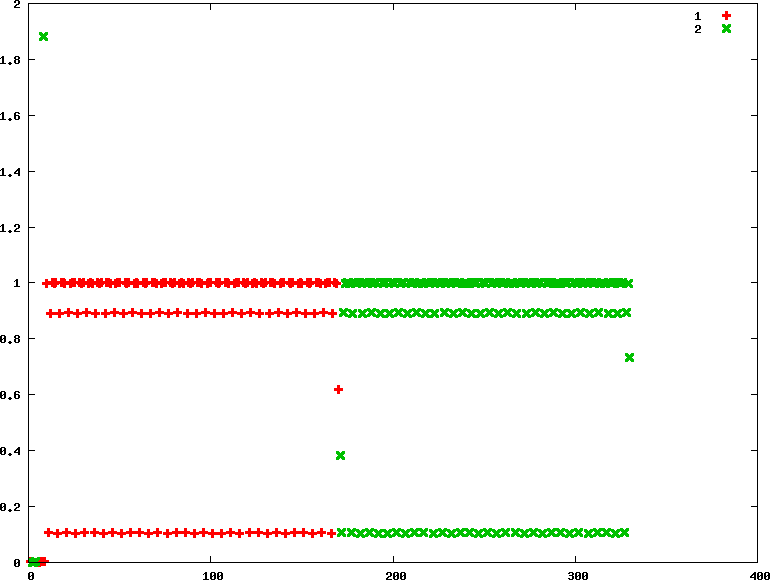
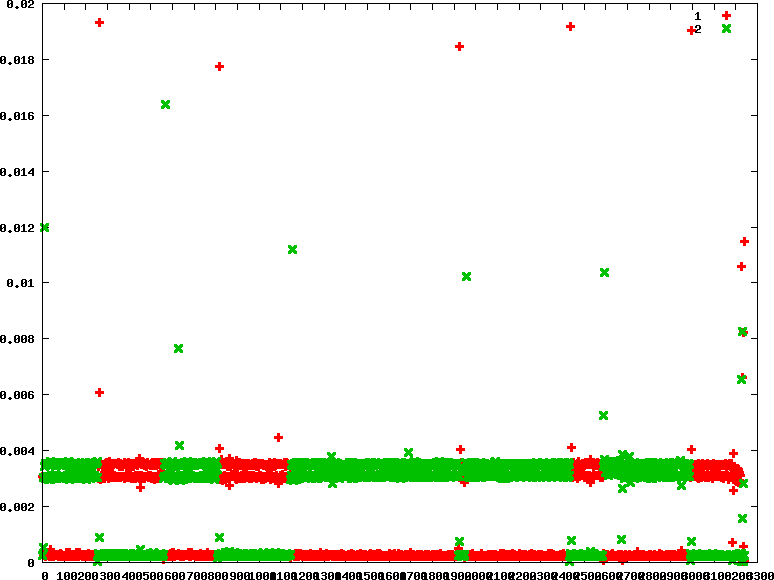
- rr : 優先權分別為90 90
chrt -r 90 ./../CPU-bound/matrix_mul &
chrt -r 90 ./../CPU-bound/matrix_mul &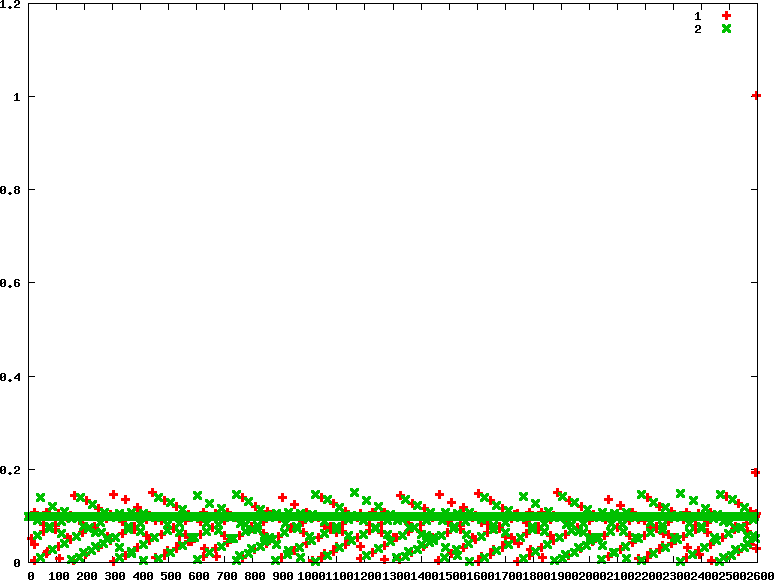
初步觀察rr policy,兩個process所分配到的time slice執行時間較為相近
另外我們可以從linux kernel原始碼中,看到預設的time slice給定是100 msecs,跟我們測出來的結果,大致符合!
/*
* default timeslice is 100 msecs (used only for SCHED_RR tasks).
* Timeslices get refilled after they expire.
*/
#define RR_TIMESLICE (100 * HZ / 1000)- rr : 優先權分別為90 45
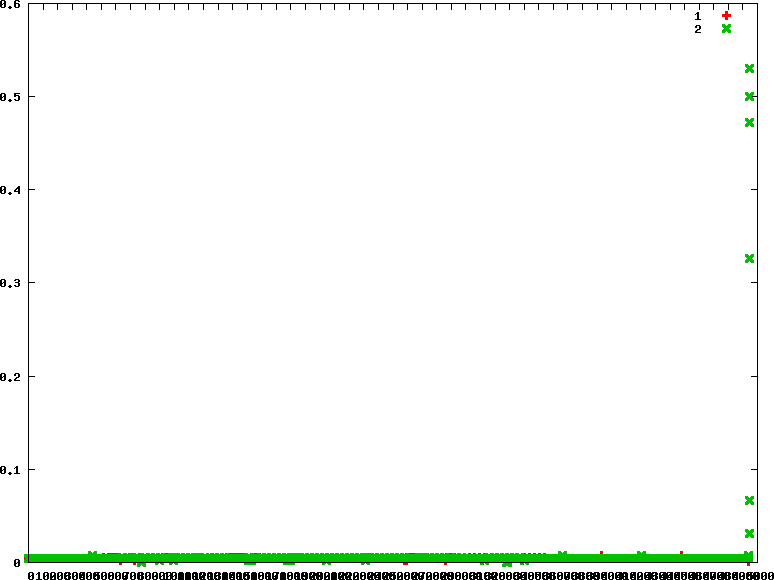
chrt -r 90 ./../CPU-bound/matrix_mul &
chrt -r 45 ./../CPU-bound/matrix_mul &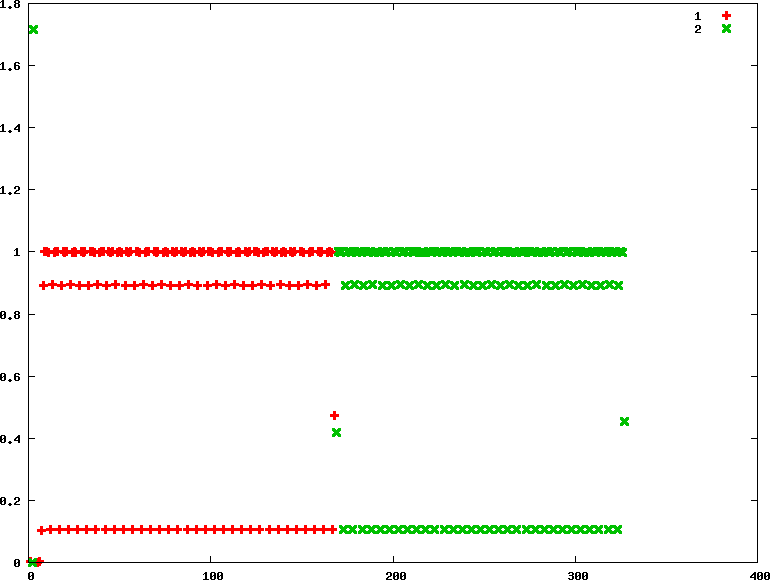
從圖上看來很不公平,不像RR比較像FIFO。 推測是給定不同優先權的關係,Linux直接以FIFO進行排班
- IO-bound
- 做的是讀檔和寫的動作
- 分別測試
fifo,rrscheduling policy,主要是看不同scheduling policy下和不同優先權的time slice給定方式和行為 - 圖示: 橫軸 : 第幾次switch , 蹤軸 : 這一次switch的time slice
- IO- BOUND的time slice都相當的短跟CPU-bound比起來
- fifo : 優先權分別為90 90
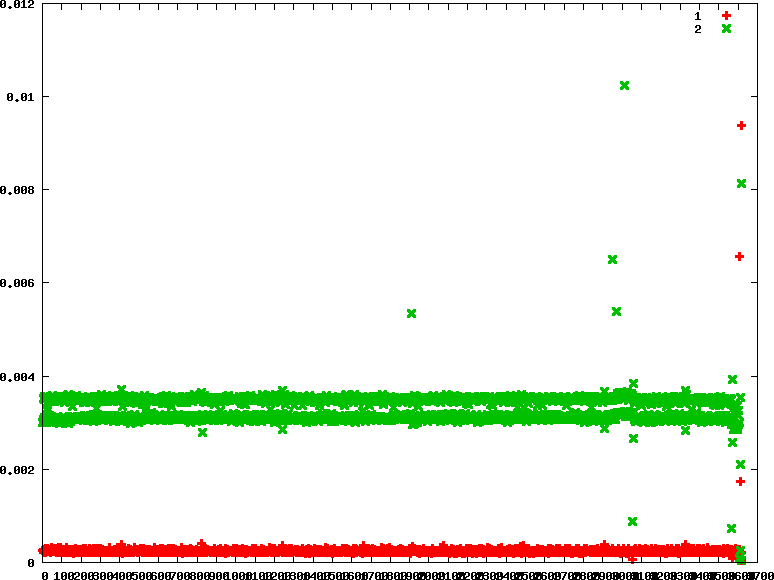
從fifo policy中,還是可以觀察兩個process還是有一直切換的,主要是因為在做IO過程是需要等待的,那在等待的過程中,linux 作業系統就會切換工作
- fifo : 優先權分別為90 45
- rr : 優先權分別為90 90
- rr : 優先權分別為90 45
Linux kernel scheduling CFS trace event
- 驗證CFS行為
- 下圖因為綠色覆蓋在紅色之上所以看不太出來是交替執行,可參考下下圖可知兩個task以極短執行時間交互運行
自動化測試工具
- 前置作業
- 詳情請見 Hackpad
- 安裝lmbench
git clone https://github.com/el8/lmbench-next.git cd lmbench-next make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- - 主程式為 auto 執行檔,藉由編譯auto.c 而來
- 程式流程圖如下
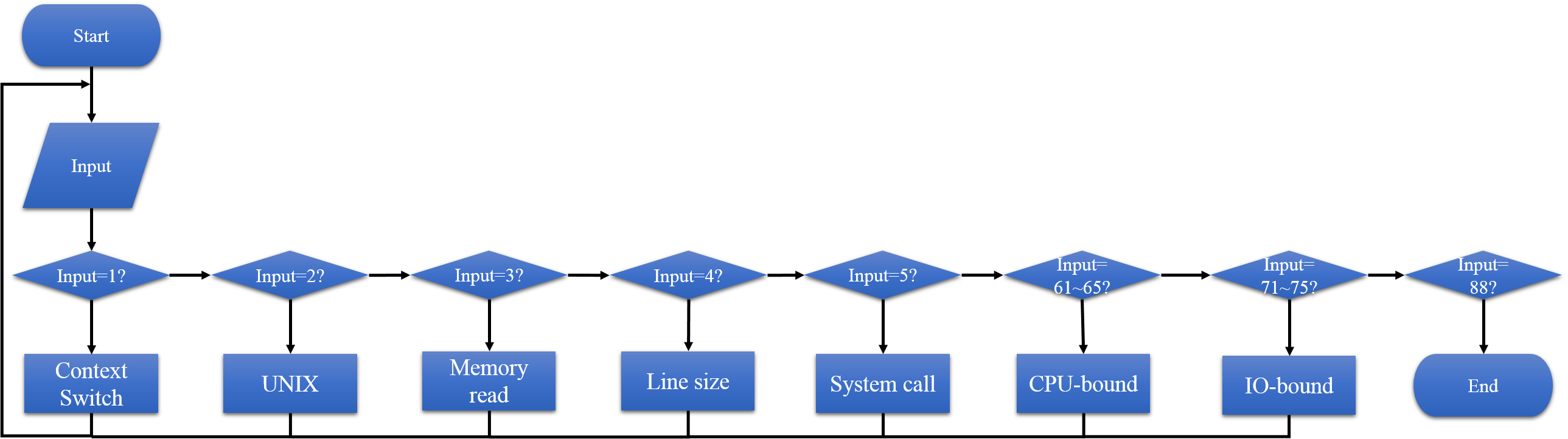
若是使用lmbench 中的指令來分析,則可以在
AUTO_TEST/lmbench-next/AUTO_TEST/中找到相對應的results 目錄,裡面會存放著結果原始檔與其畫出的圖表。- 每次選擇一項功能後,會使用lmbench 對應的執行檔輸出原始資料到results 目錄下,並且在使用gnuplot對其畫出圖表,幫助使用者分析。
若是使用Ftrace 進行 Linux-scheduling 分析,則可以在
AUTO_TEST/CPU-bound 和 AUTO_TEST/IO-bound中找到相對應的results 目錄,裡面會存放著結果原始檔與其畫出的圖表。- 每次選擇一項功能後,會使用Ftrace 對應的腳本檔輸出原始資料到results 目錄下,並且在使用gnuplot對其畫出圖表,幫助使用者分析。
- 分析內容依照類別可分為:
- CPU-bound / IO-bound
- CFS / RR / FIFO
- 權限相同(90/90) / 權限不同(90/45)
- CPU-bound / IO-bound
Q & A
- ARM-Linux Q & A : hackpad
