nuttx
組員
- 翁振育
- 黃亮穎
- 蘇偉嘉
- 李英碩
github : https://github.com/gototop/nuttx-stm32f4disc-bb
Nuttx 參考應用
NuttX 架構
與平台相關
Run Nuttx on STM32F429-Disco
(2) cd workspace/nuttx-stm32f4disc-bb/nuttx/tools
(3) ./configure.sh stm32f429i-disco/nsh
(4) cd ..
(5) make CROSSDEV=arm-none-eabi-
(6) st-flash write nuttx.bin 0x8000000
(7) sudo screen /dev/ttyUSB0 115200 8n1
設定相關應用程式與功能
120 CONFIG_ARCH_FPU=n
465 CONFIG_RTC=y
466 CONFIG_RTC_DATETIME=y
653 CONFIG_EXAMPLES_HELLO=y
676 CONFIG_EXAMPLES_OSTEST=y
Task Control Interfaces
- task_create : 產生一個activates的新task,並回傳系統指派的pid
- task_init : 將task的TCB初始化,但並不activate task
- task_activate : activate task,否則scheduler沒辦法執行它
- task_delete : 將task關掉,並deallocate它的TCB與stack
- task_restart : 將task的children砍掉,deallocate TCB,reset priority
- task_exit : 關掉目前在運行的task
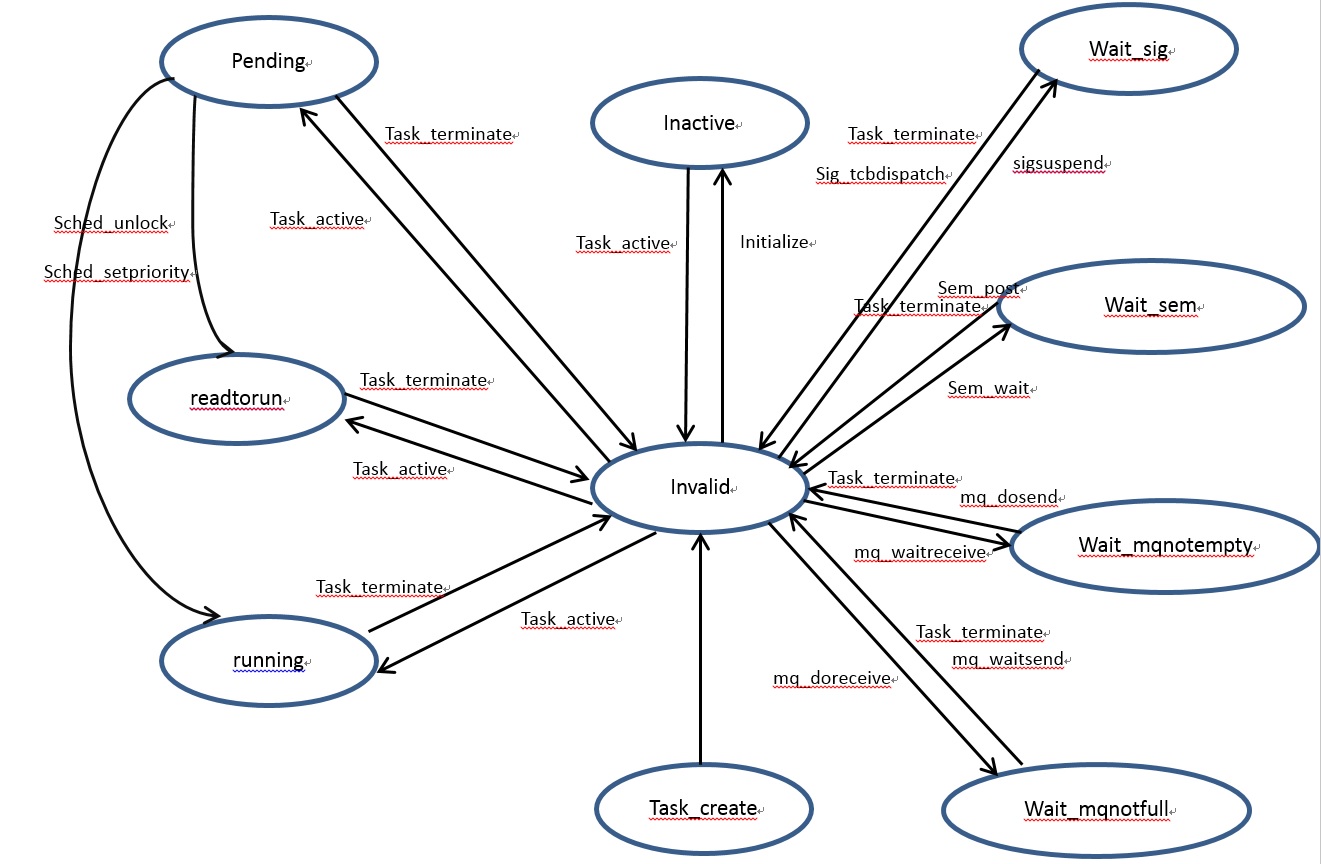
Task state
include/nuttx/sched.h
enum tstate_e
{
TSTATE_TASK_INVALID = 0, /* INVALID - The TCB is uninitialized */
TSTATE_TASK_PENDING, /* READY_TO_RUN - Pending preemption unlock */
TSTATE_TASK_READYTORUN, /* READY-TO-RUN - But not running */
TSTATE_TASK_RUNNING, /* READY_TO_RUN - And running */
TSTATE_TASK_INACTIVE, /* BLOCKED - Initialized but not yet activated */
TSTATE_WAIT_SEM, /* BLOCKED - Waiting for a semaphore */
#ifndef CONFIG_DISABLE_SIGNALS
TSTATE_WAIT_SIG, /* BLOCKED - Waiting for a signal */
#endif
#ifndef CONFIG_DISABLE_MQUEUE
TSTATE_WAIT_MQNOTEMPTY, /* BLOCKED - Waiting for a MQ to become not empty. */
TSTATE_WAIT_MQNOTFULL, /* BLOCKED - Waiting for a MQ to become not full. */
#endif
#ifdef CONFIG_PAGING
TSTATE_WAIT_PAGEFILL, /* BLOCKED - Waiting for page fill */
#endif
NUM_TASK_STATES /* Must be last */
};Register
Communication
| Semaphore | | sem_wait | sem_wait的主程式碼分為兩個部份,如果counter > 0,代表semaphore可以被hold,sem_wait會將task加入holder list | 否則sem_wait會block task,等待sem_hold unblock task,然後sem_wait再將task加入holder list
if (sem->semcount > 0)
{
sem->semcount--;
sem_addholder(sem);
rtcb->waitsem = NULL;
ret = OK;
}
else
{
sem->semcount--;
rtcb->waitsem = sem;
errno = 0;
up_block_task(rtcb, TSTATE_WAIT_SEM);
if (errno != EINTR && errno != ETIMEDOUT)
{
sem_addholder(sem);
ret = OK;
}
}| sem_post | 一般而言,sem_post會在一個task要離開critical section的時候被呼叫 | 它會先呼叫sem_releaseholder,然後檢查counter是否<= 0,若是,代表還有task在等semaphore,sem_post會找到waiting list的下一個task,unblock它
if (sem)
{
sem_releaseholder(sem);
sem->semcount++;
if (sem->semcount <= 0)
{
for (stcb = (FAR struct tcb_s*)g_waitingforsemaphore.head; (stcb && stcb->waitsem != sem); stcb = stcb->flink);
if (stcb)
{
stcb->waitsem = NULL;
up_unblock_task(stcb);
}
}
}| Mutex | nuttx的mutex實作是建立在semaphore上面 | 在使用mutex時,會先init一個binary semaphore,然後呼叫pthread_mutex_lock,pthread_mutex_lock會呼叫pthread_takesemaphore | pthread_takesemaphore會跑一個判別式是sem_wait的while loop | 當owner要交出使用權的時候,會呼叫pthread_mutex_unlock,pthread_mutex_unlock會將mutex->pid設成0,然後呼叫pthread_givesemaphore | pthread_givesemaphore會呼叫sem_post | | | pthread_mutexinit.c
int pthread_mutex_init(FAR pthread_mutex_t *mutex, FAR pthread_mutexattr_t *attr)
{
:
:
status = sem_init((sem_t*)&mutex->sem, pshared, 1);
:
:
}| phread_mutexlock.c
int pthread_mutex_lock(FAR pthread_mutex_t *mutex)
{
:
:
:
ret = pthread_takesemaphore((sem_t*)&mutex->sem);
if (!ret)
{
mutex->pid = mypid;
}
}| pthread_initalize.c
int pthread_takesemaphore(sem_t *sem)
{
if (sem)
{
while (sem_wait(sem) != OK)
{
:
:
:
}
return OK;
}
} int pthread_givesemaphore(sem_t *sem)
{
if (sem)
{
if (sem_post(sem) == OK)
{
return OK;
}
else
{
set_errno(EINVAL);
return ERROR;
}
}
else
{
set_errno(EINVAL);
return ERROR;
}
}| pthread_mutexunlock.c
int pthread_mutex_unlock(FAR pthread_mutex_t *mutex)
{
:
:
:
{
{
mutex->pid = 0;
:
:
:
ret = pthread_givesemaphore((sem_t*)&mutex->sem);
}
sched_unlock();
}
return ret;
}Scheduling
include/sys/types.h
/* HPUX-like MIN/MAX value */
#define PRIOR_RR_MIN 0
#define PRIOR_RR_MAX 255
#define PRIOR_FIFO_MIN 0
#define PRIOR_FIFO_MAX 255
#define PRIOR_OTHER_MIN 0 /* Not use */
#define PRIOR_OTHER_MAX 255 /* Not use */
/* Scheduling Priorities. NOTE: Only the idle task can take
* the true minimum priority. */
#define SCHED_PRIORITY_MAX 255
#define SCHED_PRIORITY_DEFAULT 100
#define SCHED_PRIORITY_MIN 1
#define SCHED_PRIORITY_IDLE 0觀看每個設定time slice的相關檔案其運算是皆為 timeslice = CONFIG_RR_INTERVAL / MSEC_PER_TICK
在 nuttx/include/nuttx/config.h 中
CONFIG_RR_INTERVAL = 200
MSEC_PER_TICK = 10
此區禁止 context switch
sched_unlock()用在修改scheduler和priority。
此區暫停 timer interrupt
irqrestore(saved_state);
用在修改 scheduler。
注意:timer interrupt 跟 context switch 是不同系統。
Interrupt Handler
在nuttx/arch/arm/include/stm32/irq.h和nuttx/arch/arm/include/stm32/stm32f40xxx_irq.h中分別定義了可用的ISR name和對應的vector name
Processor Exceptions (vectors 0-15)
包括Internal和Software Interrupts,設定在nuttx/arch/arm/src/chip/stm32_irq.c:void up_irqinitialize(void)
//nuttx/arch/arm/include/stm32/irq.h
#define STM32_IRQ_RESERVED (0) /* Reserved vector (only used with CONFIG_DEBUG) */
/* Vector 0: Reset stack pointer value */
/* Vector 1: Reset (not handler as an IRQ) */
#define STM32_IRQ_NMI (2) /* Vector 2: Non-Maskable Interrupt (NMI) */
#define STM32_IRQ_HARDFAULT (3) /* Vector 3: Hard fault */
#define STM32_IRQ_MEMFAULT (4) /* Vector 4: Memory management (MPU) */
#define STM32_IRQ_BUSFAULT (5) /* Vector 5: Bus fault */
#define STM32_IRQ_USAGEFAULT (6) /* Vector 6: Usage fault */
#define STM32_IRQ_SVCALL (11) /* Vector 11: SVC call */
#define STM32_IRQ_DBGMONITOR (12) /* Vector 12: Debug Monitor */
/* Vector 13: Reserved */
#define STM32_IRQ_PENDSV (14) /* Vector 14: Pendable system service request */
#define STM32_IRQ_SYSTICK (15) /* Vector 15: System tick */External interrupts (vectors >= 16)
外部中斷,設定在nuttx/arch/arm/src/stm32/chip/stm32f40xxx_vectors.h
//nuttx/arch/arm/include/stm32/stm32f40xxx_irq.h
#define STM32_IRQ_WWDG (STM32_IRQ_INTERRUPTS+0) /* 0: Window Watchdog interrupt */
#define STM32_IRQ_PVD (STM32_IRQ_INTERRUPTS+1) /* 1: PVD through EXTI Line detection interrupt */
#define STM32_IRQ_TAMPER (STM32_IRQ_INTERRUPTS+2) /* 2: Tamper and time stamp interrupts */
#define STM32_IRQ_TIMESTAMP (STM32_IRQ_INTERRUPTS+2) /* 2: Tamper and time stamp interrupts */
#define STM32_IRQ_RTC_WKUP (STM32_IRQ_INTERRUPTS+3) /* 3: RTC global interrupt */
#define STM32_IRQ_FLASH (STM32_IRQ_INTERRUPTS+4) /* 4: Flash global interrupt */
.如何設定Interrupt Handler?
//irq_attach(STM32_IRQ_SVCALL, up_svcall); //System Call
//nuttx/sched/irq_attach.c
int irq_attach(int irq, xcpt_t isr)
{
state = irqsave(); //disables all interrupts
if(isr == NULL)
{
up_disable_irq(irq);
isr = irq_unexpected_isr;
}
g_irqvector[irq] = isr; //Vector Table
irqrestore(state);
ret = ok;
}Interrupt Handling的分層架構
low-level logic, arch/arm/src/armv7-m/up_exception.S, 接收Interrupt並決定IRQ number
That low-level logic than calls some MCU-specific, intermediate level function up_doirq(), mask and acknowledge the interrupt, dispatch, unmask
That MCU-specific function then calls the NuttX common interrupt dispatching logic irq_dispatch()
STM32_IRQ_SYSTICK
//(void)irq_attach(STM32_IRQ_SYSTICK, (xcpt_t)up_timerisr);
//up_exception.S -> up_doirq(int irq, uint32_t *regs)-> irq_dispatch(int irq, FAR void *context) -> up_timerisr(int irq, uint32_t *regs) -> sched_process_timer(void) -> sched_process_timeslice()
static void sched_process_timeslice(void)
{
if((rtcb->flags & TCB_FLAG_ROUND_ROBIN) != 0)
{
if(rtcb->timeslice <= 1)
{
if(!rtcb->lockcount)
{
rtcb->timeslice = CONFIG_RR_INTERVAL/MSEC_PER_TICK;
if (rtcb->flink && rtcb->flink->sched_priority >= rtcb->sched_priority)
{
up_reprioritize_rtr(rtcb, rtcb->sched_priority);
}
}
}
else
{
rtcb->timeslice--;
}
}
}Configuring High Priority Interrupts
How do you specify a high priority interrupt? if CONFIG_ARCH_RAMVECTORS=y, then vectors will be kept in RAM and the system will support the interface
int up_ramvec_attach(int irq, up_vector_t vector). That interface can be used to attach your C interrupt handler to the vector at run time.
//up_vector_t g_ram_vectors[ARMV7M_VECTAB_SIZE] __attribute__((section(".ram_vectors"))); //Using a RAM-based vector table
//void up_ramvec_initialize(void) //Copy vectors to RAM an configure the NVIC to use the RAM vectors.
int up_ramvec_attach(int irq, up_vector_t vector) //Configure the ram vector table so that IRQ number 'irq' will be dipatched by hardware to 'vector'
{
int ret = ERROR;
if ((unsigned)irq < ARMV7M_PERIPHERAL_INTERRUPTS)
{
irqstate_t flags;
flags = irqsave();
if (vector == NULL)
{
up_disable_irq(irq);
vector = exception_common;
}
g_ram_vectors[irq] = vector;
irqrestore(flags);
ret = OK;
}
return ret;
}FPU
儲存 fpu 的 context switch
up_savefpu:
add r1, r0, #(4*REG_S0) /* R1=Address of FP register storage */
/* Some older GNU assemblers don't support all the newer UAL mnemonics. */
#if 1 /* Use UAL mnemonics */
/* Store all floating point registers. Registers are stored in numeric order,
* s0, s1, ... in increasing address order.
*/
vstmia r1!, {s0-s31} /* Save the full FP context */
/* Store the floating point control and status register. At the end of the
* vstmia, r1 will point to the FPCSR storage location.
*/
vmrs r2, fpscr /* Fetch the FPCSR */
str r2, [r1], #4 /* Save the floating point control and status register */
#else
/* Store all floating point registers */
#if 1 /* Use store multiple */
fstmias r1!, {s0-s31} /* Save the full FP context */
#else
vmov r2, r3, d0 /* r2, r3 = d0 */
str r2, [r1], #4 /* Save S0 and S1 values */
str r3, [r1], #4
vmov r2, r3, d1 /* r2, r3 = d1 */
str r2, [r1], #4 /* Save S2 and S3 values */
str r3, [r1], #4
vmov r2, r3, d2 /* r2, r3 = d2 */
str r2, [r1], #4 /* Save S4 and S5 values */
str r3, [r1], #4
vmov r2, r3, d3 /* r2, r3 = d3 */
str r2, [r1], #4 /* Save S6 and S7 values */
str r3, [r1], #4
vmov r2, r3, d4 /* r2, r3 = d4 */
str r2, [r1], #4 /* Save S8 and S9 values */
str r3, [r1], #4
vmov r2, r3, d5 /* r2, r3 = d5 */
str r2, [r1], #4 /* Save S10 and S11 values */
str r3, [r1], #4
vmov r2, r3, d6 /* r2, r3 = d6 */
str r2, [r1], #4 /* Save S12 and S13 values */
str r3, [r1], #4
vmov r2, r3, d7 /* r2, r3 = d7 */
str r2, [r1], #4 /* Save S14 and S15 values */
str r3, [r1], #4
vmov r2, r3, d8 /* r2, r3 = d8 */
str r2, [r1], #4 /* Save S16 and S17 values */
str r3, [r1], #4
vmov r2, r3, d9 /* r2, r3 = d9 */
str r2, [r1], #4 /* Save S18 and S19 values */
str r3, [r1], #4
vmov r2, r3, d10 /* r2, r3 = d10 */
str r2, [r1], #4 /* Save S20 and S21 values */
str r3, [r1], #4
vmov r2, r3, d11 /* r2, r3 = d11 */
str r2, [r1], #4 /* Save S22 and S23 values */
str r3, [r1], #4
vmov r2, r3, d12 /* r2, r3 = d12 */
str r2, [r1], #4 /* Save S24 and S25 values */
str r3, [r1], #4
vmov r2, r3, d13 /* r2, r3 = d13 */
str r2, [r1], #4 /* Save S26 and S27 values */
str r3, [r1], #4
vmov r2, r3, d14 /* r2, r3 = d14 */
str r2, [r1], #4 /* Save S28 and S29 values */
str r3, [r1], #4
vmov r2, r3, d15 /* r2, r3 = d15 */
str r2, [r1], #4 /* Save S30 and S31 values */
str r3, [r1], #4
#endif
/* Store the floating point control and status register */
fmrx r2, fpscr /* Fetch the FPCSR */
str r2, [r1], #4 /* Save the floating point control and status register */
#endif
bx lr
.size up_savefpu, .-up_savefpu up_restorefpu:
add r1, r0, #(4*REG_S0) /* R1=Address of FP register storage */
/* Some older GNU assemblers don't support all the newer UAL mnemonics. */
#if 1 /* Use UAL mnemonics */
/* Load all floating point registers. Registers are loaded in numeric order,
* s0, s1, ... in increasing address order.
*/
vldmia r1!, {s0-s31} /* Restore the full FP context */
/* Load the floating point control and status register. At the end of the
* vstmia, r1 will point to the FPCSR storage location.
*/
ldr r2, [r1], #4 /* Fetch the floating point control and status register */
vmsr fpscr, r2 /* Restore the FPCSR */
#else
/* Load all floating point registers Registers are loaded in numeric order,
* s0, s1, ... in increasing address order.
*/
#if 1 /* Use load multiple */
fldmias r1!, {s0-s31} /* Restore the full FP context */
#else
ldr r2, [r1], #4 /* Fetch S0 and S1 values */
ldr r3, [r1], #4
vmov d0, r2, r3 /* Save as d0 */
ldr r2, [r1], #4 /* Fetch S2 and S3 values */
ldr r3, [r1], #4
vmov d1, r2, r3 /* Save as d1 */
ldr r2, [r1], #4 /* Fetch S4 and S5 values */
ldr r3, [r1], #4
vmov d2, r2, r3 /* Save as d2 */
ldr r2, [r1], #4 /* Fetch S6 and S7 values */
ldr r3, [r1], #4
vmov d3, r2, r3 /* Save as d3 */
ldr r2, [r1], #4 /* Fetch S8 and S9 values */
ldr r3, [r1], #4
vmov d4, r2, r3 /* Save as d4 */
ldr r2, [r1], #4 /* Fetch S10 and S11 values */
ldr r3, [r1], #4
vmov d5, r2, r3 /* Save as d5 */
ldr r2, [r1], #4 /* Fetch S12 and S13 values */
ldr r3, [r1], #4
vmov d6, r2, r3 /* Save as d6 */
ldr r2, [r1], #4 /* Fetch S14 and S15 values */
ldr r3, [r1], #4
vmov d7, r2, r3 /* Save as d7 */
ldr r2, [r1], #4 /* Fetch S16 and S17 values */
ldr r3, [r1], #4
vmov d8, r2, r3 /* Save as d8 */
ldr r2, [r1], #4 /* Fetch S18 and S19 values */
ldr r3, [r1], #4
vmov d9, r2, r3 /* Save as d9 */
ldr r2, [r1], #4 /* Fetch S20 and S21 values */
ldr r3, [r1], #4
vmov d10, r2, r3 /* Save as d10 */
ldr r2, [r1], #4 /* Fetch S22 and S23 values */
ldr r3, [r1], #4
vmov d11, r2, r3 /* Save as d11 */
ldr r2, [r1], #4 /* Fetch S24 and S25 values */
ldr r3, [r1], #4
vmov d12, r2, r3 /* Save as d12 */
ldr r2, [r1], #4 /* Fetch S26 and S27 values */
ldr r3, [r1], #4
vmov d13, r2, r3 /* Save as d13 */
ldr r2, [r1], #4 /* Fetch S28 and S29 values */
ldr r3, [r1], #4
vmov d14, r2, r3 /* Save as d14 */
ldr r2, [r1], #4 /* Fetch S30 and S31 values */
ldr r3, [r1], #4
vmov d15, r2, r3 /* Save as d15 */
#endif
/* Load the floating point control and status register. r1 points t
* the address of the FPCSR register.
*/
ldr r2, [r1], #4 /* Fetch the floating point control and status register */
fmxr fpscr, r2 /* Restore the FPCSR */
#endif
bx lr
.size up_restorefpu, .-up_restorefpu
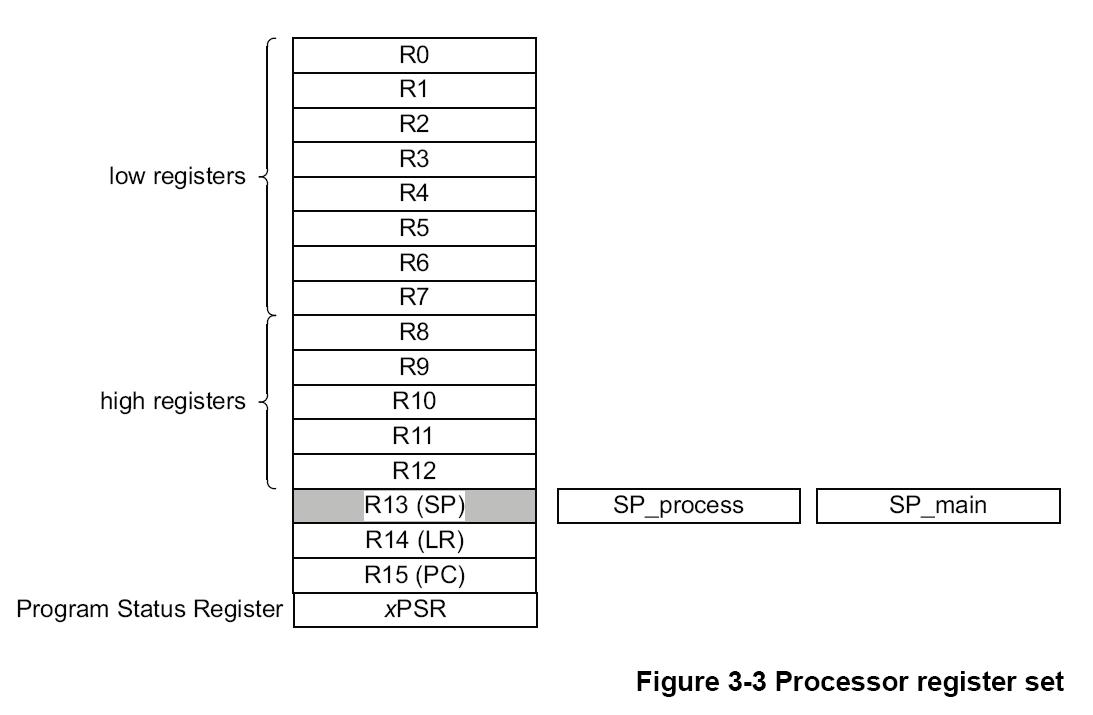
#endif /* CONFIG_ARCH_FPU */struct xcptcontext
/nuttx/arch/arm/include/armv7-m/irq_lazyfpu.h
XCPTCONTEXT_REGS = HW_XCPT_REGS + SW_XCPT_REGS
XCPTCONTEXT_SIZE = 4 * XCPTCONTEXT_REGS
其中8個為硬體一般暫存器包含R0 to R3, R12, R14 = LR, R15 = PC, XPSR
其中軟體暫存器浮點數FP共33個 S0 to S31, FPSCR
原本10個軟體一般暫存器 R13 = SP, PRIMASK, R4 to R11
依序存入XCPT由software registers SP開始到R11,浮點數S0到FPSCR,再來是 hardware registers R0到XPSR
測試環境架設
硬體驅動原理
- UART
- FPU (Floating Point Unit)
效能表現
參考資料
- https://github.com/deadbeefcafe/nuttx-stm32f4disc-bb
- http://bibliodigital.itcr.ac.cr/xmlui/bitstream/handle/2238/3051/FinalReport.pdf
