- Provided by: Lucas Wei
- GIT repository/branch:
https://gitcafe.com/embedded2013/Labs/tree/SOL-11
priority scheduling
- 原本使用 round robin 來輪流執行每個 task,並使用每個 task[-1]
的位置來紀錄狀態
- 先修改架構,並且引入 TCB 來增加程式的可讀性
- 其中又有紀錄 status, priority, stack pointer, delaytime (by
tick),因此可以針對每個 task 有更好的架構
- 針對 system call 方面就因此有 delay 和 setpriority
的產生,可以用來更進一步的操作 TASK
- 有了 delay 後,新增兩個 task: task1 task2,用來模仿 Lab-8 的呈現方式
- 可用四倍 delay time的方式,來輪流輸出hello1 hello2。
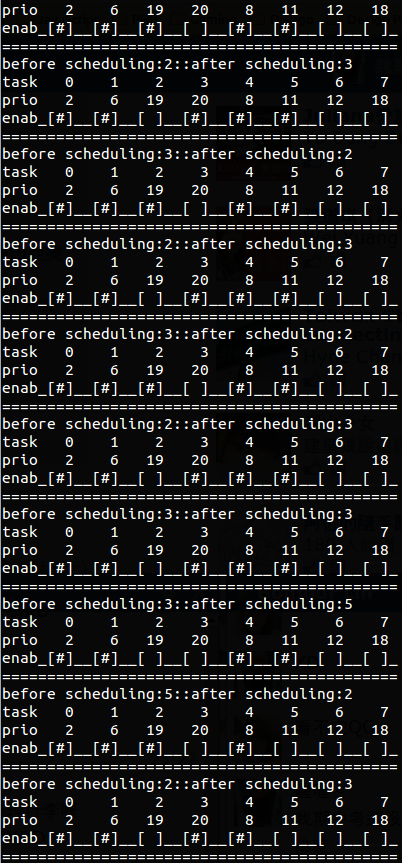
- 驗證 priority scheduling 的方式,是使用 GDB
來追蹤狀態,如下圖:
message queue
- 主要針對message queue實作兩個界面
- 將寫入寫出的部份更改為 system call,避免在過程中被
interupt,導致輸出入不完全,
- 而在驗證的過程中,發現同時ECHO會有延遲,之後大量輸出的問題,如圖
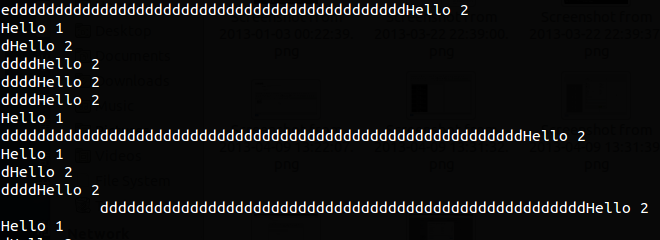
- 後來經過長時間的追蹤後發現,是因為 ring buffer 內部的 macro
寫錯了,所導致的 buffer overflow
- 會將要輸出的字元寫到下一個ring buffer
- 主要原因是BR_PUSH, BR_POP內,對於長度的偵測沒有正確,
- 因此只要修正後,程式的互動可以更即時的反應結果,也不會有輸出的單一字元錯誤的問題。
