Lab12: RTOS Visualization
預期目標
- 延展過去幾次的實驗與作業,設計出一個具體而微的 FreeRTOS 視覺化機制
- 學習 Grasp 視覺化工具
Grasp
Understanding and validating the timing behavior of real-time systems is not trivial.
Many real-time operating systems and their development environments do not provide tracing support, and provide only limited visualization, measurements and analysis tools.
Grasp is a tool for tracing, visualizing and measuring the behavior of real-time systems. It provides a simple plugin infrastructure for extending Grasp with custom visualization and measurement methods.
PDF: Grasp: Tracing, Visualizing and Measuring the Behavior of Real-Time Systems
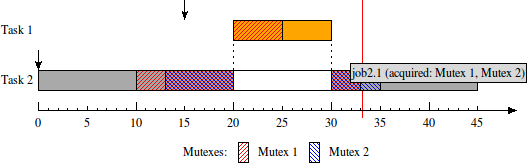
mutex 視覺化輸出
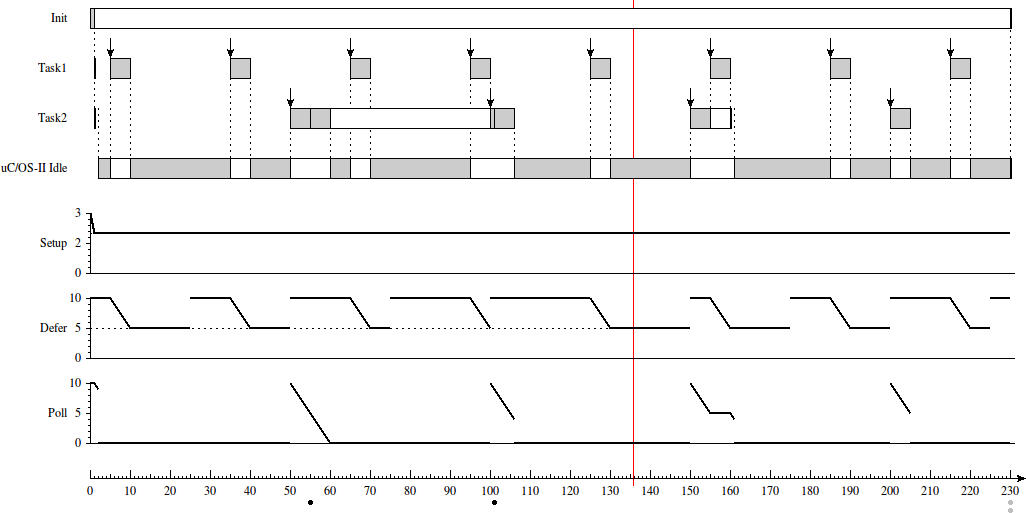
- RTOS scheduling 視覺化輸出
作業
- 適度修改 Lab-12/freertos 目錄底下的檔案,以 Grasp 重新實作視覺化機制
- 需要包含 context-switch
- 需要包含 mutex 的視覺化
- 可參考 Grasp Recorder 的 instrumentation,以便在 FreeRTOS 作事件紀錄
- 程式碼一律提交到 Git repository,操作方式請參考 Lab-11
make gdbauto時,應該要產生sched.grasp檔案
繳交作業
- 截止日期:
- 成大/中正: Apr 12, 2013 (含) 之前
- 寄件到
jserv.tw@gmail.com
- 標題:
- 成大: “[NCKU/Lab12]” 開頭,後面加學號與姓名
- 中正: “[CCU/Lab12]” 開頭,後面加學號與姓名
- 格式不合者,不計分!
- 標題:
- 信件內應該描述開發的想法、面臨的技術問題以及如何克服
- 以及關於 context-swicth / mutex 的畫面輸出
